
Overview
This is a tutorial on how to build mechanically realistic helicopters in besiege. There are many ways to build fake and unrealistic helicopters but where’s the fun in that? The rotors of a mechanically realistic helicopter spins at a relatively constant RPM, and the steering is made through changes in the angle of attack of the rotor blades. This requires some complex and fascinating mechanisms, and this is what I will show you how to build. Compared to planes, helicopters are more challenging to build, more mechanically complex and harder to understand. But that is why they are so fun to build and fly. This tutorial is therefore for people who are already familiar with the basics of flight. I highly suggest that you watch Shade’s tutorials on how to build airplanes before attempting the same with helicopters. Mods are not required.
Introduction
Helicopters are aircrafts that, unlike planes, are able to take off and land vertically. They achieve this capability by having long rotating wings called rotors instead of fixed wings.
VTOL (vertical take-off and landing) is an awesome feature but it comes at a high cost: mechanical complexity and difficulty of construction. But this is also why helicopters are so fun to build and fly!
I have over 800 hours played in besiege, and most of that time has been spent building helicopters, trying out different designs to what works best and studying how real helicopters work.
There are many ways to build a realistic helicopter. Many of the designs I have seen, however, are either not fully functional, lack the necessary features or are very block heavy, and therefore, to a large degree, unsuited for the purpose of building a functional helicopter. However, I finally think I have arrived at a very robust and easy to understand design that uses a minimal amount of blocks, contains all the necessary features.
This design and my extensive knowledge of helicopters that I will share with you in this tutorial, should make building a mechanically realistic and functional helicopter easier than ever before.
Want to learn how to build something like this? Then read on.
Mods are not required for this tutorial. I do highly recommend that you acquire building tools, easy scale mod and no bounds mods. No bounds mod will enable to change the values of any block. For example, it will be possible to increase the speed of a motor wheel beyond 2x. Without no bounds mod you will need to build a tall stack of motor wheels and that will be very cumbersome.

For these reasons, I will supplement with how mods can be used in those cases where it can be very helpful.
Flight Controls
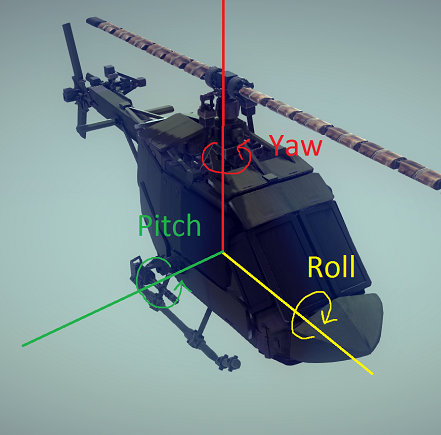
Like airplanes, helicopters pitch, roll, yaw and accelerate to move around in the airspace. An airplane does this with flight control surfaces that manipulates the lift generated around the surfaces of the airplane. Remember that pitch is the nose moving up or down, roll is side to side movement and yaw turns the aircraft. Like an airplane, a helicopter also needs a vertical and horizontal stabilizer.
The steering mechanisms for airplanes, however, are relatively simple and the airplane as a whole is relatively easy to balance and make flyworthy. In a helicopter, however, the flight control mechanisms are built into the rotor assembly itself, and that is a lot more complex. This mechanism is called a swashplate.
The Swashplate
Here you see a picture of a four-bladed rotor system with a swashplate. You can download it here. If you have never seen a swashplate before this probably looks completely alien. At least that’s how I felt when I first saw one. But don’t worry. I will explain very carefully how it works and how to build it.
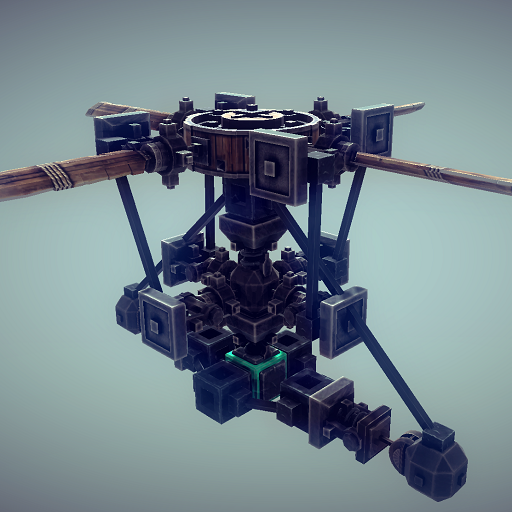
The swashplate works by changing the angle of attack of the blades as they go around. This causes more lift to be produced on one side of the rotor and less lift to be produced on the other side. As a result the helicopter is able to move around.
The swashplate consists of two parts: a lower and an upper swashplate. The lower swashplate, is stationary and consists of four pistons moving around an inert block. Note that since pistons are used, the controls are RTC (return-to-center). The lower swashplate transmits movements to the upper swashplate, which is spinning together with the rotor. The upper swashplate then pushes on the pitch hinges, which causes the blades to change angle of attack. Control inputs made through the swashplate are called cyclic pitch or cyclic for short.

A helicopter also needs a way to increase and decrease the thrust. It does this by changing the angle of attack of all blades simultaneously. That is the purpose of the last mechanism, which is called the collective pitch. It works by moving the entire swashplate up or down, thereby causing all the pitch hinges to be pushed in the same direction. The piston just under the rotor, highlighted in yellow, is simply there to act as a suspension so the swashplate is able to freely move up and down.
By using steering hinges for the collective pitch mechanism, you can find just the level of thrust you want. Most people use steering wheels attached directly to the pitch hinges and that works fine as well. But by using steering hinges, you can limit the range of motion of the collective, insuring a more precise fine-tuning of the helicopter. My method is also how the mechanism works in a real life helicopter.
In this video I show how to build a swashplate and demonstrate how it all works. Please note that the swashplate is tethered to the ground so it doesn’t spin around because of the torque. You will be better able to understand how it works if you try building it yourself.
Rotor Configurations
Now that you know how a swashplate works, you are not far from building an actual helicopter. But first you need to decide on what rotor configuration your helicopter should have. A helicopter needs at least two rotors to function because of the torque generated by a single rotor. This can be achieved in a variety of ways. There are five basic rotor configurations: coaxial, transverse, tandem, single main rotor/tail rotor and intermeshing. I don’t have experience with intermeshing so I wont be covering that.
I have made it easy for you by uploading all the necessary mechanisms for each rotor configuration to my workshop, which I will provide links for in the next sections. So you wont be required to build any mechanisms of your own.
Coaxial
A coaxial configuration are when two main rotors are mounted on top of each other. The rotors spins in opposite directions to cancel out each others torque. Examples of coaxial rotors are the KA-52 and the S-97 Raider.
The coaxial rotor configuration offer the best flying characteristics compared to the others. It is easier to balance, to steer and to fly forward in a straight line. It is for these reasons that most of the helicopter designs on the workshop are of this configuration. It is the best choice to start your first helicopter with.
I have uploaded a coaxial design here that you can use.
How a coaxial rotor achieves:

Pitch: Cyclic (longitudinal)
Roll: Cyclic (lateral)
Yaw: Differential collective
Please be aware that this design achieves yaw by changing the speed of the rotors. That is not actually realistic. This method would be ineffective for a real life coaxial rotor. Instead it achieves yaw through differential collective, and most coaxial rotors also feature cyclic for both the upper and lower rotor. These are very complex mechanisms, and it’s why coaxial rotors are so uncommon in real life despite their superior flying characteristics. In besiege they also requires mods to build. Here’s an example. Yet this design still lacks differential collective for the lower rotor.
However, I think there is no need to be fanatical about realism if you are new to swashplate controlled helicopters. My other designs are completely realistic though.

Advantages: Offers the best flying characteristics, easy to balance, shouldn’t be affected by dissymmetry of lift but can under some circumstances.
Disadvantages: Mechanically complex, very hard to build and fine-tune a truly realistic coaxial rotor.
Transverse
A transverse configuration are when two main rotors are mounted side by side. Notable examples are the V-22 Osprey, the Mil-V12, which was the largest helicopter ever built and the Focke-Wulf Fw 61, which is regarded as the worlds first practical and functional helicopter.
Like a coaxial rotor, a transverse rotor do not suffer from dissymmetry of lift, and is therefore able to fly in a straight line. This is a subject I will touch upon in a later section. The downside of a transverse configuration is that the yaw control becomes a roll to the opposite during forward flight. The rotors simply act like ailerons when doing this.
I have uploaded a transverse rotor here that you can use.
How a transverse rotor achieves

Pitch: cyclic (longitudinal)
Roll: Differential collective
Yaw: Differential cyclic (longitudinal) or by tilting one rotor forward and the other backward. The scorpion gunship in my workshop has this particular mechanism.
Note that the rotor assembly for the transverse configuration has a return-to-center collective pitch mechanism. This is used for roll.
Advantages: Doesn’t suffer from dissymmetry of lift, fairly easy to balance
Disadvantages: Rolls to the opposite side when yaw is applied during forward flight
Tandem
A tandem rotor configuration is when two rotors are mounted one in front of the other. A notable example is the CH-47 Chinook.
Things will start to become more tricky now. We are venturing into the realm of assymmetry. When the front rotor in spinning in one direction, and the back rotor is spinning in the opposite direction, we are dealing with an assymmetrical aircraft, which will be affected by dissymmetry of lift. During forward flight a tandem rotor will therefore tend to yaw to one side, and the pitch control might cause the helicopter to yaw and roll as well because of the difference in torque created. It might act in other strange ways as well. In a later section I will explain how to remedy these issues.
I have uploaded a tandem rotor here that you can use.
How a tandem rotor achieves:

Pitch: differential collective
Roll: cyclic (lateral)
Yaw: differential cyclic (lateral)
Advantages: Stable in hover.
Disadvantages: Suffers slightly from dissymmetry of lift, can be tricky to balance,
Single Main Rotor
A single main rotor configuration is where a single main rotor provides all the lift and thrust and a smaller vertically mounted tail rotor counters the torque and provides yaw control.
It is the most mechanically simple and for this reason it is by far the most common rotor configuration in real life. However, it is also conceptually and aerodynamically the most challenging configuration. It was actually considered a theoretical and practical impossibility before Igor Sikorsky built his VS-300 in 1939.
The inherent asymmetry of this configuration brings with it some serious drawbacks. But while these issues can be remedied in real life through precise mathematical calculcations, it is not so easy to do in besiege. I do not recommend beginners to try and tackle with this configuration. Mods are also essential to solving these issues and make the helicopter balanced.
If you feel up to the challenge anyway, you can download a design here. Tail rotor included.
In a later section, I will do a complete guide on how to build single main rotor configurations.

Advantages: Mechanically simple
Disadvantages: Suffers from dissymmetry of lift, suffers from the translating tendency, very hard to balance, requires mod to balance properly, has a lower thrust to weight ratio since there is only one rotor to provide lift.
Rotor Blade Design
The rotor configuration designs that I have presented so far are true functional and flyworthy helicopters. But their short rotor blades have limitations. With longer blades it is possible to produce more thrust with the same engine power.
A rotor with short blades is said to have a high disc loading. The disc loading is measured as the weight of the aircraft divided by the area that the rotor blades sweep or the disc area. You can think of disc loading as another word for hover efficiency.
A real life example illustrates this. Take the CH-47 Chinook and the V-22 Osprey. The Osprey has 30 percent more horsepowers but only a 5 percent higher maximum take-off weight compared to the Chinook. The explanation for this is the difference in rotor disc area. The Osprey only has 212 m2 compared to the Chinooks 520m2.
It is, unfortunately, easier said than done to build longer rotor blades in besiege. I have spent countless hours trying to find an optimal design. Longer rotor blades means heavier rotor blades and that increases the risk of the blade breaking apart at high speeds. Making them stronger with braces also makes them heavier, and that can put you back where you started. The trick is to build a long rotor blade that is not only strong and light but also has many propellers for lift.
Here you can download the same coaxial swashplate design from before but with longer blades. It is able to carry over twice as much cargo as the other coaxial rotor design.

For mod users: I highly recommend using Hidden Block 52 from the PBP2 mod. They are the perfect block for rotor blades. I also highly recommend using scaled down large wheels (with easy scale mod) as pitch hinges instead of swivel joints. Both the attachment points of block 52 and large wheels are almost indestructable. Unfortunately, it is not possible to skin block 52.

Dissymmetry of Lift
There is an aerodynamic phenomenon unique to helicopters that you must understand. The lift produced by the rotor blades may not be equal across the entire rotor disc, and this can cause some trouble.
The lift that each rotor blade produces is proportional to the speed at which it travels through the air. This means that when the helicopter is at a standstill in the air (a hover) each rotor blade produces the same amount of lift. The problem occurs when the helicopter starts moving forward. The rotor blade that moves in the same direction as the helicopter (the advancing blade) will have its airspeed added by the speed of the helicopter, and it will therefore start to produce more lift, while the rotor on the opposite side (the retreating blade) will produce less lift. This uneven lift will cause the helicopter to roll to the side of the retreating blade. Look at the figure for a visual illustration. The yellow arrows indicate the direction of the helicopter and the blue arrows indicate the direction of the rotor blades.

The effects of dissymmetry of lift depends on the rotor configuration. The transverse configuration is not affected. The coaxial configuration shouldn’t be affected either but it can if the rotor blades are too short or spins too slowly. However, the rotor blades can collide with each other during fast forward flight if they are not spaced apart sufficiently.
How dissymmetry of lift affects tandem rotors is more complex and I don’t even understand it fully. Usually it will tend to yaw to one side and other times it will roll to one side. It will also roll when you pitch up or down. Try it out with my tandem rotor design. It flies pretty straight but still behaves in some strange ways.
However, it is the single main rotor configuration that suffers the most from dissymmetry of lift. The uneven lift across the rotor disc will cause a violent roll to the side of the retreating blade. This needs to be addressed before a succesful single main rotor configuration can be realized.
Solutions to Dissymmetry of Lift
Fortunately, it is possible to remedy the effects of dissymmetry of lift. It can first of all be reduced by increasing the speed of the rotor. Faster spinning rotor blades reduce the relative difference in airspeed between the advancing and retreating blade.
A very simple solution is to place propellers to counter the various yaw and roll effects that your helicopter might suffer from. Simply place vertical propellers on the back or front of your tandem rotor if it’s dealing with an unintentional yaw. Or in the case of a single main rotor configuration, place horizontal propellers on each side.
This method works fairly well but the downside is that the propellers cause drag and will therefore slow down your helicopter. Also it may not work for all forward flight speeds.
Real life helicopters, however, counter dissymmetry of lift by allowing each individual blade to move up and down. This up and down movement is called flapping. Flapping is made possible by the fact that real life rotor blades aren’t rigidly attached to the rotor head. The rotor blades are either attached through flapping hinges or the rotor blades are designed to be flexible, especially at the root. I will demonstrate how to construct flapping hinges in the next section.
Here’s how flapping works: The advancing blade flaps up, thus decreasing its angle of attack while the retreating blade flaps down, increasing its angle of attack. This results in a more evenly balanced lift across the rotor disc.
An easy way to increase the flapping of the rotor blades is to make them longer. Long blades are more flexible than short blades.
Flapping Hinges
There are two kinds of rotor systems that incorporate flapping hinges: fully articulated and semi-rigid. The rotor system I have presented so far is a simple rigid rotor system that is completely unsuited for single main rotor configurations (unless you use long and fast spinning blades from block 52)
The flapping hinges on the fully articulated rotor system allow each blade to independently move up and down, while still allowing the blades to pitch from the inputs from the swashplate. Notice how the flapping hinge is aligned with the pitch link swivel joint.


You may think that these flapping would cause the rotor blades to flap up high in the sky when they start spinning and generate lift but the centrifugal forces insures that they don’t. They will however flap down when they aren’t spinning unless some stops are installed, which are shown in this picture. This mechanism prevents the rotor blade from flapping down while still allowing it to flap up with no resistance.
Flapping hinges have other advantages too. They generally cause the rotor blades to be more stable than rigid rotors and are better able to handle heavy loads. The rotor blade of a rigid rotor bends at the root, putting it under tremendous stress, when carrying a heavy weight. No bending forces occurs with flapping hinges, which simply flaps up when put under high stress.

For mod users: The flapping hinge can become much more simple with the use of building tools and easy scale mod.
The second rotor system, semi-rigid rotor system, uses a seesaw action to flap the blades. In this system the blades are connected to each other through a common flapping hinge, and are thus not allowed to flap up and down independently. If one blade flaps up, the other blade must flap down.

A semi-rigid rotor system needs to have an equal amount of blades since one blade is connected to the opposite. This particular example has two blades but semi-rigid rotors with four or six blades are possible using the same principle but requires a slightly more complex mechanism. The two bladed semi-rigid rotor system has the advantage of being simple.

For mod users: Again the mechanism can be more simple if you use building tool and easy scale mod.
Several of my helicopters on the workshop use this type of rotor system. A word of caution though. A two bladed rotor system tends to be shaky. At least my design is. It can be almost eliminated through much trial and error. However, I recommend that you use the fully articulated rotor system first.

Fine-tuning the Swashplate
You may discover that steering on your helicopter isn’t completely accurate. The steering might be too sensitive or not sensitive enough. Many of these issues can be remedied by fine-tuning the swashplate. However, building tools mod and easy scale mod are required to do this.
A common problem is that the steering is inaccurate. Instead of pitching straight down, the helicopter might also roll a few degrees to the right or left. Sometimes it may even be off by a whole 90 degrees so that it rolls right instead of pitching down for example. This can sometimes occur after large modifications has been made to the rotor system. Rotors are like gyroscopics and they behave in strange ways. In this case, however, you simply need to reassign the key bindings on the lower swashplate, so that the key for pitching down becomes roll to the right.
If, however, the controls are off by a number between 0 and 90 degrees, you need to use building tools mod to solve it. The best way is to rotate the upper swashplate.

You may also want the controls to be more sensitive, or less sensitive. You can increase sensitivity by lenghtening the swivel joints on the upper swashplate and moving the hinge joint accordingly as shown in the picture. Decrease sensitivity by shortening the swivel joints.
Slower spinning blades also tend to make the steering more sensitive.

Asymmetry of Lift
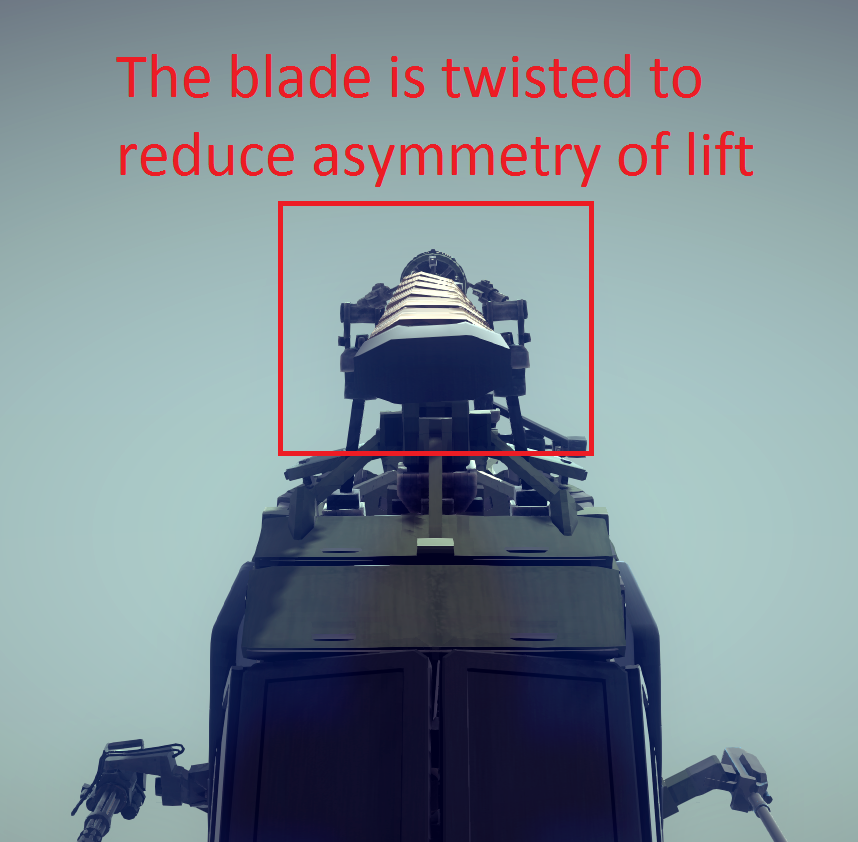
Asymmetry of lift, not to be confused with dissymmetry of lift, is an another important aerodynamic feature of helicopters (and planes too). An understanding of this will help you to increase the lift generated by your rotor blades.
The airspeed of a rotor blade is not the same across the entire length. It is highest at the tip and slowest at the root. An uneven amount of lift is therefore being generated across the length of the rotor blade. That is not efficient. But by twisting the blades a more even lift can be achieved and this will greatly increase the total lift generated. Building tools mod, however, is required to rotate each individual propeller. I have also found out that a well twisted blade will tend to reduce vibrations on a two-bladed semi-rigid rotor system. What the optimal amount of blade twisting is depends on the helicopter and what its purpose is. A heavy lift helicopter will need more blade twist than an attack helicopter. You will need to use trial and error to find the most optimal twist.
Getting the Single Main Rotor Configuration Right
The single main rotor configuration must seem like the easy choice because it’s the most common configuration in real life but as mentioned earlier it is actually the conceptually and aerodynamically most tricky. But if you have ambitions towards building replicas of real life helicopters, your selection will be vastly limited if you shy away from single rotor helicopter because you do not how to build them.
All of the issues with the single main rotor configuration relates to the interaction between the main rotor and tail rotor. Although it is possible to remedy these issues, a single main rotor configuration will never be as stable in a hover as a dual main rotor configuration (coaxial, transverse, tandem)
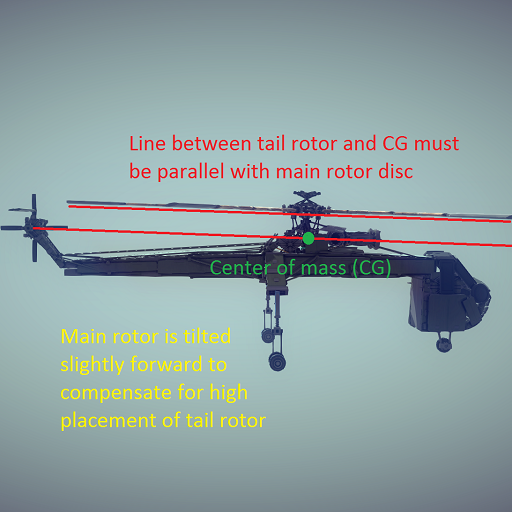
The placement of the tail rotor is crucial to the stability of the helicopter. If the tail rotor is placed too high or too low, it will cause the helicopter to roll. Ideally the tail rotor should be placed so that the line between the tail rotor and center of mass is parallel with the main rotor disc.
On many real life helicopters, the tail rotor is placed very high up. There are two reasons for this. Increased safety is one of them but another one is that it allows the main rotor to be tilted forward so the helicopter can be level while flying forward.
You can also compensate for this issue by adding weight to either side of the helicopter. This can be a good option when trying to iron out the last imbalances.
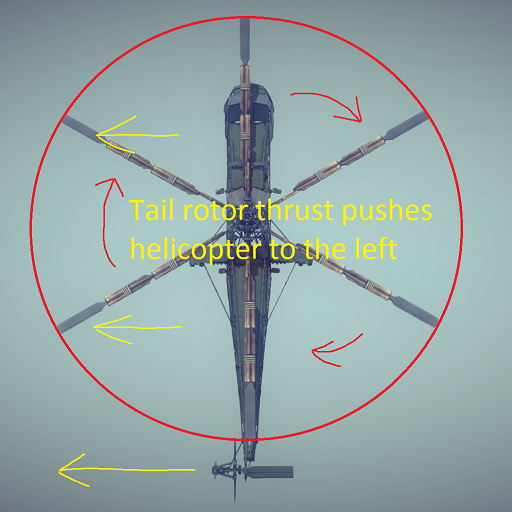
Another issue with the tail rotor is the translating tendency. Besides from countering the torque, the thrust from the tail rotor will also push the aircraft sideways. This effect can be reduced by placing the tail rotor further from the center of mass. But by tilting the main rotor in the opposite direction, it can be completely eliminated. However, if you tilt the main rotor too much it will affect forward flight performance. So first place the tail rotor far away from the center of mass.
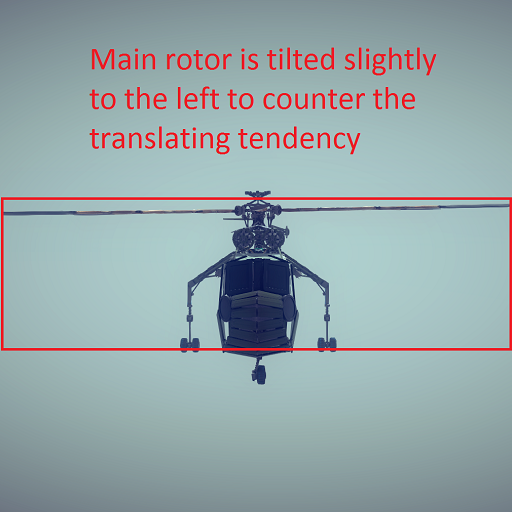
Note that you have to tilt the entire swashplate assemply too. I recommend doing this as the last step before finishing the helicopter.
Another issue with the single main rotor configuration is tail heaviness. Lots of additional weight often has to be added to the front in order to make the helicopter balanced. I highly recommend that you acquire no bounds mod to avoid having to place multiple 2x ballast blocks.
Concluding Remarks
You know now everything you need to make a succesful realistic helicopter. However, getting the helicopter to perform how you want it to will still be a time consuming process. Helicopters are complex flying machines that needs to be stable in a hover and still be able to fly in a straight line. Don’t get frustrated though. The more you practice, the better you will become and the deeper your knowledge will become. I still don’t fully understand them, and sometimes they frustrate me as well.
I recommend that you stick to small helicopters in the beginning, and then move on to larger and more complex designs as your skill increases.
Let me know in the comments if you have questions or think this tutorial needs improvements.
I wish you good luck with your helicopter engineering.
Big Mathis