
Overview
How to set up and configure your racing wheel in multiple ways, And even how to include a handbrake
Intro
This guide is to help people set up their racing wheel on Linux, it should contain everything related to a steering wheel, If you think something is missing let me know 🙂
Racing wheels should work out of the box on Linux, Including Force Feedback, Shifters and most things you can throw at it. But if you like to fine tune some things you may need some software. This is mostly not even the case, I played a long time just using the default kernel drivers, But some of these tools might come in very handy if you play different games, with different settings or with unsupported wheels.
Turning Degree and Lock
The Turning Degree is how far you have to turn your wheel to register 100% right or left input. When your Force Feedback stops the wheel at that point it is called Steering Range Lock.
You can accomplish this in many ways, Some games allow you to tweak it in game, so you won’t need a tool for it, But if you like your settings to carry over between games, Or create profiles for different games, Or just tweak a little extra you will need some tools. There is LTWheelConfig, But it is kinda complicated and outdated so I won’t include it here.
There are 2 newer options available, Oversteer and PyLinuxWheel. Oversteer has more functions but you would need a DKMS module for these extra functions, So If you don’t plan on installing lg4ff you can just pick either one.

Manual Shifting & Lights
Manual shifting also works out of the box on Linux, At least for my Logitech shifter.
Some games have some trouble with it, especially older ones like Grid Autosport. Oversteers compatibility mode can help in these cases, Compatibility mode might also fix other issues, Just try and figure out what works best for you.
The Clutch will also work out of the box, It might feel a bit unnatural, You can decrease the range a bit in the game settings, So that it gives 100% when you press the pedal 80% or so. This will make the clutch feel a lot more natural and prevent a bunch of misshifts.
The Shifting Lights, Do not work out of the box for me on my G29, You can enable them with oversteer after you installed lg4ff. They won’t show when to shift, But they show the FF intensity instead. You can simply create profiles to remember all your settings for each game seperately.
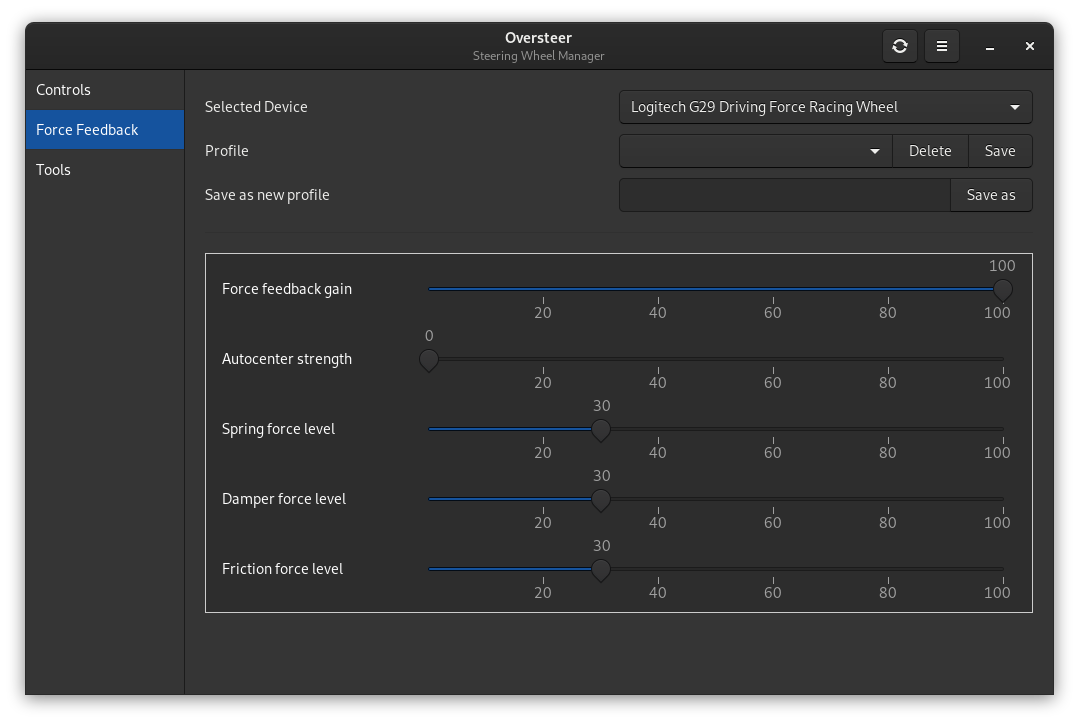
Force Feedback
Force Feedback will also work out of the box on Linux for most games without any additional software. If you want to fine tune some things outside of the game you would need some software like Oversteer. If you want to fine tune that even more or want FF in ETS2, ATS and some specific proton games you have to install lg4ff which enables a few specific effects, enables FF in the forementioned games and allows you to tweak even more Force Feedback settings.
If you want to tweak the lower 3 settings you will need lg4ff, I will explain how to install it in the tools section.
Handbrakes
Handbrakes are not that common sadly, You can purchase an expensive one from Fanatec, buy one from Aliexpress or create your own.
If you use a Fanatec Handbrake You just need to add a few lines with the correct ProductID and VendorID to the inputdevices.json file of the game. For Feral games it will be located in the installation folder under the /Share directory. Just add the folllowing lines with the correct ProductID and VendorID before the last ] of the file. These Product and Vendor IDs are for a Arduino Leonardo. You can find the right Product and Vendor IDs by typing lsusb -v in a terminal when the device is connected.
If you made your own or bought a complete handbrake sim set from Aliexpress or Ebay and it is not working properly follow the following instructions.
Download this little zip file, It includes inputdevice.json files for Dirt Rally and Dirt 4, It also includes the Arduino Sketch, The Joystick Library and a little readme file.
[link]Install Arduino, it will be in your repositories, Just type sudo apt-get install arduino or sudo pacman -S arduino, or whatever package manager you use.
Copy the Joystick folder in the Joystick master zip file to the Arduino libraries folder which is located in ~/Arduino/libraries
Open Arduino and replace all text with this content
Make sure you put the right Arduino model and the right USB port in tools
Then click on Verify and if it succeeds press Upload to flash it to the Arduino.
If needed you can adjust the values (rawValue, 750, 1023, 0, 255). These may be different depending on how you built it
Now the Arduino is a functional Handbrake in Racing games 🙂
Tools
There are a few options available, You don’t need any really, But if you like to tweak some extra settings for your wheel I would recommend lg4ff and oversteer as a nice combination, You won’t need the others. Optionally you can go for lg4ff with PyLinuxWheel. Or just use Oversteer or PyLinuxWheel on itself without lg4ff. I would recommend against LTWheelConfig tho, It is heavily outdated. It might even break more than it fixes.
[link]
Oversteer is the basic application that will enable you to tweak a lot of the settings for your steering wheel, To install it follow the following instructions.
If you are on a Arch based system it will be available in the AUR, so use your pacman GUI or run the folllowing commands.
First clone the repository
Now change the directory to the just downloaded folder
Now build and install the package
If you use a Debian based distro like Ubuntu, Mint, Pop, etc you need to manuallly install it.
First install the required packages
Download the newest zip from the github link, Extract it and open the folder in a terminal, Right click oversteer-master and click Open in Terminal. then run the folllowing command
Finally install it and give it your password when it asks for it.
[link]
lg4ff is a kernel module that offers better support for Logitech Wheels, It enables things that are not possible without it. To install it follow the following instructions.
If you are on a Arch based system it will be available in the AUR, so use your pacman GUI or run the folllowing commands.
First clone the repository
Now change the directory to the just downloaded folder
Now build and install the package
If you use a Debian based distro like Ubuntu, Mint, Pop, etc you need to manuallly install it.
First install dkms
Now we need to download the lg4ff zip file from the github link above.
After the download extract the folder and rename the extracted folder to new-lg4ff
Finally copy the folder to /usr/src/ and then run the following command to install it.
Reboot your system and to confirm it installed correctly you can start Oversteer and see if the lower 3 FF settings are adjustable.
[link]
PyLinuxWheel is a tool like Oversteer, It has less functions, but is also a great project with some unique functions like sharing profiles more easily. It is also an appimage, So just download and run it using the following instructions
Go to [link] And download the latest appimage. After it finished downloading right click the file, go to permissions, mark it as executable and then just open it with “run software”
If you are on a Debian based system like Ubuntu you can also download and install the .deb. It should be between your programs after this.
[link]
LTWheelConfig was our only option for a long time, before the kernel supported wheels out of the box, But these days it is heavily outdated, And it won’t give you any extra functionality compared to the out of the box kernel drivers, It is even lacking in some functionality and it does not include a GUI. But If you like to be oldschool or like to break things, I recommend following this guide.
Udev Rules
Udev controls the permissions of the USB device, You need to set them for whatever tool you want to use.
If you use Oversteer or PyLinuxWheel it can set it for you, Just click yes when it asks for it and enter your password If you use other tools or even games and want them to be able to adjust these advanced settings you manually need to set the udev rules.
Remember that if you use Oversteer (or PyLinuxWheel) you don’t need to do the ones for the games specifically. Oversteer will handle it, not the game. If you choose to not use oversteer some games might need some additional configuration, Dirt 4 for example will give this notification
to enable all the functionality if you don’t use tools like Oversteer you need to run the following commands, Replace the directory if you use a non default install directory for games.

Fanatec Wheels
Logitech Wheels
After you copied the right file run the following command to make it take effect.
Conclusion
In short, Install Oversteer, Install lg4ff, reboot, and you should be ready to go, Or don’t, it should work out of the box if you don’t care about fine tuning. If you have a handbrake it might need some extra tweaking. But I hope this guide helped with setting up your wheel on Linux.
If you have any suggestions, Please leave them in a comment below 🙂