MechJeb 100%
Установка
MechJeb можно скачать с официального сайта CurseForge[www.curseforge.com].
Устанавливается MechJeb как и любой другой мод, в Kerbal Space Program, в папку "GameData".
Найти папку можно выбрав Kerbal Space Program в вашей библиотеке Steam, далее нажать правой кнопкой мышки по игре, выбрать "Свойства", "Локальные файлы", "Посмотреть локальные файлы". В открывшейся папке, выбрать папку GameData. Далее открыть загруженный архив с MechJeb и переместить папку из архива в GameData.
Устанавливается MechJeb как и любой другой мод, в Kerbal Space Program, в папку "GameData".
Найти папку можно выбрав Kerbal Space Program в вашей библиотеке Steam, далее нажать правой кнопкой мышки по игре, выбрать "Свойства", "Локальные файлы", "Посмотреть локальные файлы". В открывшейся папке, выбрать папку GameData. Далее открыть загруженный архив с MechJeb и переместить папку из архива в GameData.
Что делает MechJeb?
MechJeb, это мощная модификация способная автоматизировать многие процессы в игре. MechJeb может выводить ракеты на орбиту по нажатию одной кнопки, автопилот способен контролировать курс самолета, его высоту и скорость, автоматическая посадка самолета на взлетно-посадочную полосу, автоматическая посадка ракет на любой спутник или планету в указанную точку, автопилот наземного транспорта, движение по курсу и по созданным маршрутным точкам, контроль системы автоматической стабилизации, умное ускорение времени, планировщик маневров и еще огромное количество параметров и функций облегчающих контроль, взаимодействие и общий игровой процесс в Kerbal Space Program.
Как включить MechJeb?
Модуль MechJeb находится во вкладке "Ориентация и управление". При этом, его установка на ракету не обязательна. Достаточно включить на любом командном модуле функцию MechJeb.
Enabled - Включено
Disabled - Отключено
Enabled - Включено
Disabled - Отключено
Функционал в ангаре
По умолчанию, в ангаре доступно четыре окна MechJeb.
Vessel Info - Информация о судне.
Custom Window Editor - Настройка окон.
Settings - Общие настройки.
Delta-V Stats - Информация о ракете и ее ступенях.
Vessel Info - Информация о судне.
Custom Window Editor - Настройка окон.
Settings - Общие настройки.
Delta-V Stats - Информация о ракете и ее ступенях.
Для отображения корректных значений во многих окнах, нужно в правильном порядке расставить очередность запуска ступеней. Разобравшись с очередностью ступеней в ангаре, вы сэкономите кучу времени и нервов на старте!
Aircraft Approach & Autoland - Посадка
Автоматическая посадка самолета на взлетно-посадочную полосу. 📺
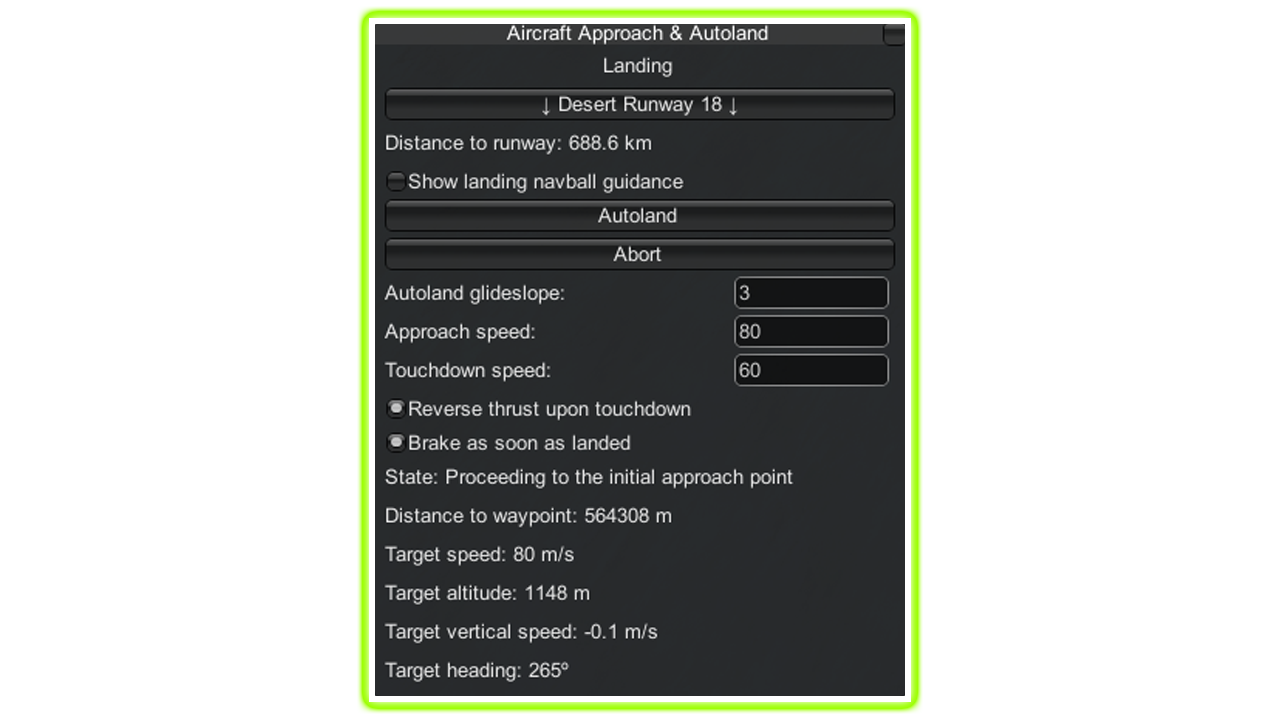
MechJeb может автоматически посадить самолет на любой из трех аэродромов.
"Landing" - Выбирается аэродром и сторона с которой будет выполнен заход.
![]() Desert Runway 18 - ВПП пустыни. (Сторона 18)
Desert Runway 18 - ВПП пустыни. (Сторона 18)
Desert Runway 36 - ВПП пустыни. (Сторона 36)
KSC Runway 09 - ВПП Кербал Спейс Центра. (Сторона 09)
KSC Runway 27 - ВПП Кербал Спейс Центра. (Сторона 27)
Island Runway 09 - ВПП Острова. (Сторона 09)
Island Runway 27 - ВПП Острова. (Сторона 27)
![]() AutoLand - Активация автопилота.
AutoLand - Активация автопилота.
Abort - Отключение автопилота.
Autoland Glideslope - Глиссада или оптимальная траектория для посадки.
Approach Speed - Скорость при выполнении маневра захода на посадку.
Touchdown Speed - Скорость приземления перед посадкой.
Reverse Thrust Upon Touchdown - Включить реверс двигателей сразу после посадки.
Brake As Soon As Landed - Включить тормоза сразу после посадки.
![]() Ниже данные промежутка путевых точек в которых находится самолет.
Ниже данные промежутка путевых точек в которых находится самолет.
State - Стадия описывает то, что делает автопилот в данный момент.
Distance To Waypoint - Расстояние до следующей путевой точки.
Target Speed - Целевая скорость.
Target Altitude - Целевая высота.
Target Vertical speed - Целевая вертикальная скорость.
Target Heading - Целевой курс.
При подлете к полосе, автопилот автоматически выпускает шасси.
MechJeb может автоматически посадить самолет на любой из трех аэродромов.
"Landing" - Выбирается аэродром и сторона с которой будет выполнен заход.
Desert Runway 36 - ВПП пустыни. (Сторона 36)
KSC Runway 09 - ВПП Кербал Спейс Центра. (Сторона 09)
KSC Runway 27 - ВПП Кербал Спейс Центра. (Сторона 27)
Island Runway 09 - ВПП Острова. (Сторона 09)
Island Runway 27 - ВПП Острова. (Сторона 27)
Abort - Отключение автопилота.
Autoland Glideslope - Глиссада или оптимальная траектория для посадки.
Approach Speed - Скорость при выполнении маневра захода на посадку.
Touchdown Speed - Скорость приземления перед посадкой.
Reverse Thrust Upon Touchdown - Включить реверс двигателей сразу после посадки.
Brake As Soon As Landed - Включить тормоза сразу после посадки.
State - Стадия описывает то, что делает автопилот в данный момент.
Distance To Waypoint - Расстояние до следующей путевой точки.
Target Speed - Целевая скорость.
Target Altitude - Целевая высота.
Target Vertical speed - Целевая вертикальная скорость.
Target Heading - Целевой курс.
При подлете к полосе, автопилот автоматически выпускает шасси.
Aircraft Autopilot - Автопилот
Aircraft Autopilot может удерживать самолет на заданном вами курсе, высоте и скорости. Полезная функция, если вам нужно добраться на самолете в удаленную точку планеты. 📺
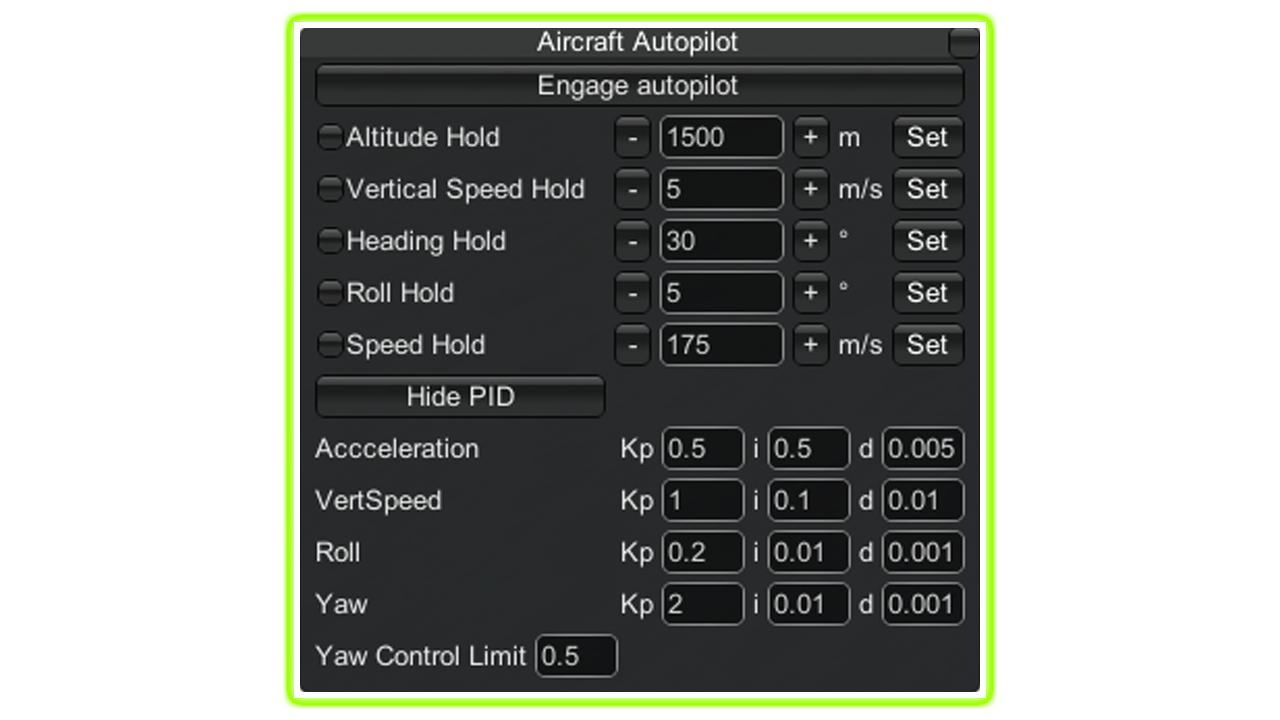
Engage Autopilot - Активирует автопилот.
Altitude Hold - Удержание высоты.
Vertical Speed Limit - Вертикальный предел скорости подъема, спуска на эту высоту.
Heading Hold - Азимут. Отвечает за то, в какую сторону будет лететь самолет.
Roll Limit+ - Предел крена самолета при смене азимута.
Roll Hold - Удержание крена самолета. В отличии от Heading Hold, самолет будет летать кругами. Чем больше значение, тем меньше радиус круга. Полезная функция если нужно зависнуть над каким нибудь местом.
Speed Hold - Скорость самолета.
![]() Слева, работает Roll Hold (Удержание крена) самолет летает кругами.
Слева, работает Roll Hold (Удержание крена) самолет летает кругами.
Справа Heading Hold, самолет летит в заданном направлении.
![]()
![]() Acceleration - Тяга.
Acceleration - Тяга.
Vertical Speed - Вертикальная скорость.
Roll - Крен.
Yaw - Рыскание.
Yaw Control Limit - Предел контроля рыскания.
![]() Влияние изменения параметров PID (Kp,Ki,Kd) на переходную характеристику системы.
Влияние изменения параметров PID (Kp,Ki,Kd) на переходную характеристику системы.
 Статья на Википедии[ru.wikipedia.org].
Статья на Википедии[ru.wikipedia.org].
Engage Autopilot - Активирует автопилот.
Altitude Hold - Удержание высоты.
Vertical Speed Limit - Вертикальный предел скорости подъема, спуска на эту высоту.
Heading Hold - Азимут. Отвечает за то, в какую сторону будет лететь самолет.
Roll Limit+ - Предел крена самолета при смене азимута.
Roll Hold - Удержание крена самолета. В отличии от Heading Hold, самолет будет летать кругами. Чем больше значение, тем меньше радиус круга. Полезная функция если нужно зависнуть над каким нибудь местом.
Speed Hold - Скорость самолета.
Справа Heading Hold, самолет летит в заданном направлении.
PID - Пропорционально-интегрально-дифференцирующий регулятор
PID регулятор отвечает за плавность выполнения команд автопилотом. Внесенные изменения сохраняется для каждого типа судна, одноименные суда будут иметь общую настройку. Vertical Speed - Вертикальная скорость.
Roll - Крен.
Yaw - Рыскание.
Yaw Control Limit - Предел контроля рыскания.
Статья на Википедии[ru.wikipedia.org].
Ascent Guidance - Руководство по выходу на орбиту
Модуль Ascent Guidance позволяет выводить ракету на устойчивую орбиту в автоматическом режиме. Запуск, также, может производиться к цели на орбите, или в плоскость ее орбиты. 📺
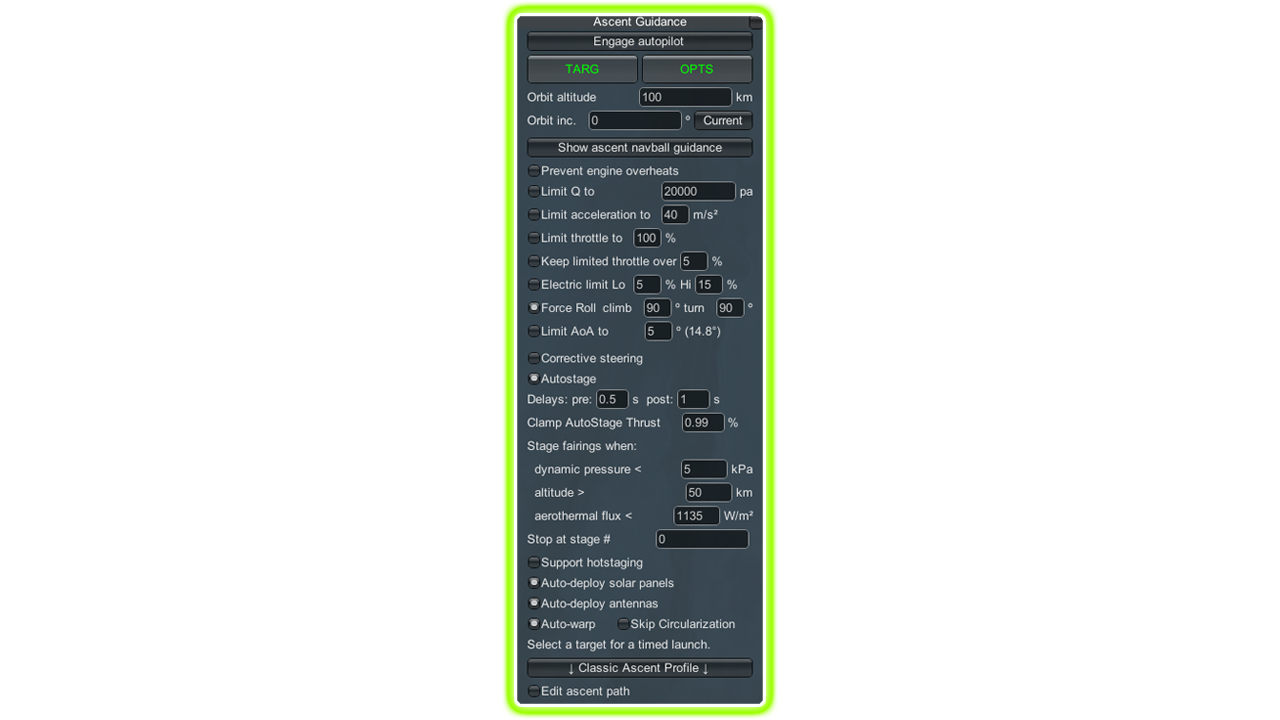
Engage Autopilot - Включение автопилота.
Disengage Autopilot - Отключение автопилота.
Orbit Altitude - Высота орбиты на которую должна выйти ракета.
Orbit Inc - Наклон в градусах для конечной орбиты.
![]() Show Ascent Navball Guidance - Показать маркер на навигационной сфере.
Show Ascent Navball Guidance - Показать маркер на навигационной сфере.
Маркер указывает направление автопилота, эта функция не работает.
![]() Prevent Overheats - Предотвратить перегрев деталей.
Prevent Overheats - Предотвратить перегрев деталей.
Limit Q To - Уменьшить тягу если оказанное на ракету давление превысит указанное.
![]() Limit Acceleration To - Предельное ускорение до.
Limit Acceleration To - Предельное ускорение до.
Параметр не может повлиять на твердотопливные ускорители.
![]() Limit Throttle To - Ограничить тягу двигателей в процентах.
Limit Throttle To - Ограничить тягу двигателей в процентах.
Параметр не может повлиять на твердотопливные ускорители.
![]() Keep Limited Throttle Over - Параметр связан с Limit Q.
Keep Limited Throttle Over - Параметр связан с Limit Q.
При избыточном давлении двигатели ограничивают свою тягу, но не ниже указанного процента. Нужно настроить если у ракеты отсутствуют гиродины или стабилизаторы, а контроль ориентацией аппарата в пространстве осуществляется только векторной тягой двигателей.
![]() Electric Limit Lo - Параметр для контроля расхода электроэнергии ионными двигателями.
Electric Limit Lo - Параметр для контроля расхода электроэнергии ионными двигателями.
![]() Force Roll - Сразу после взлета, ракета развернется вокруг своей вертикальной оси.
Force Roll - Сразу после взлета, ракета развернется вокруг своей вертикальной оси.
Параметр используется для шаттлов и аппаратов с неравномерным центром тяжести.
![]() Limit AoA To - Параметр отвечающий за угол наклона ракеты.
Limit AoA To - Параметр отвечающий за угол наклона ракеты.
При снижении давления, автопилот начнет менять угол атаки для выхода на орбиту.
![]() Corrective Steering - Усиление корректирующего рулевого управления.
Corrective Steering - Усиление корректирующего рулевого управления.
Параметр может пригодится если у ракеты плохой отклик на команды автопилота.
![]() AutoStage - Автоматический сброс использованных ступеней ракеты.
AutoStage - Автоматический сброс использованных ступеней ракеты.
По умолчанию, сброс пустых ступеней происходит через 0.5 секунд после того, как в них закончилось топливо, а через одну секунду запуск двигателей следующей ступени.
![]() Clamp AutoStage Thrust - Функция не работает должным образом или используется так редко, что о ней совсем нет никакой информации. Оставьте значение умолчанию в 0.99%
Clamp AutoStage Thrust - Функция не работает должным образом или используется так редко, что о ней совсем нет никакой информации. Оставьте значение умолчанию в 0.99%
![]() Stage Fairings When - Сценарий сброса обтекателя. По умолчанию, при снижении динамического давления до 5 паскалей, или по достижении высоты в 50 километров, или снижению плотности теплового потока до 1135 Вт/м2 обтекатели будут сброшены.
Stage Fairings When - Сценарий сброса обтекателя. По умолчанию, при снижении динамического давления до 5 паскалей, или по достижении высоты в 50 километров, или снижению плотности теплового потока до 1135 Вт/м2 обтекатели будут сброшены.
![]() Stop At Stage - После сброса какой ступени отключить автоматический сброс ступеней?
Stop At Stage - После сброса какой ступени отключить автоматический сброс ступеней?
Если вы хотите сбросить какую то ступень самостоятельно, укажите ее номер.
MechJeb сбросит ступени находящиеся до нее, а указанную ступень трогать не будет.
![]() Support Hotstaging - Функция не работает должным образом или используется так редко, что о ней совсем нет никакой информации. Если включить, по умолчанию стоит значение в 1 секунду.
Support Hotstaging - Функция не работает должным образом или используется так редко, что о ней совсем нет никакой информации. Если включить, по умолчанию стоит значение в 1 секунду.
![]() Auto-Deploy Solar Panels - Автоматическое раскрытие солнечных панелей на орбите.
Auto-Deploy Solar Panels - Автоматическое раскрытие солнечных панелей на орбите.
Auto-Deploy Antennas - Автоматическое развертывание антенн на орбите.
Auto-Warp - Автоматическое ускорение времени до следующего маневра.
![]() Skip Circularization - Пропустить маневр (скругление орбиты) в апоцентре.
Skip Circularization - Пропустить маневр (скругление орбиты) в апоцентре.
Автопилот выведет ракету на заданную вами высоту Orbit Altitude, но включать двигатели для завершения маневра не будет, полет получится суборбитальным.
![]() Edit Ascent Path - Включить Ascent Path Editor.
Edit Ascent Path - Включить Ascent Path Editor.
![]() Ascent Path Editor - Изменение параметров выхода на орбиту.
Ascent Path Editor - Изменение параметров выхода на орбиту.
Полное описание этого параметра смотрите в главе - Ascent Guidance - Ascent Path Editor.
![]()
Для его активации, сначала нужно выбрать цель на орбите. Нажмите кнопку "M" и выберите на карте объект, космическую станцию или ракету к которой вы хотите подлететь и нажмите "Установить цель".
Следующие параметры станут доступны только после выбора цели.
Launch Countdown - За какое время выключить ускорение и начать обратный отсчет?
Launch To Rendezvous - Запуск в цель. Этот параметр отвечает за запуск ракеты непосредственно к самой цели, так по завершению маневра ваше расстояние до цели будет минимальное, около одного километра.
Launch Into Plane Of Target - Запуск в плоскость цели.
Конечная орбита будет иметь такую же плоскость, направление, радиус как и у цели.
![]() Как вывести ракету на цель или в плоскость цели?
Как вывести ракету на цель или в плоскость цели?
Видео с использованием Launch Into Plane Of Target (Запуск в плоскость цели). 📺
![]()
 В Ascent Guidance очень много параметров и большинство из них настраиваются единожды.
В Ascent Guidance очень много параметров и большинство из них настраиваются единожды.
Поэтому неиспользуемые параметры можно частично скрыть или показать.
TARG - Кнопка показывает целевую орбиту и ее наклон, а с выбранной целью ее параметры.
OPTS - Опции. С зажатой кнопкой отображаются все настройки и параметры описанные выше.
Engage Autopilot - Включение автопилота.
Disengage Autopilot - Отключение автопилота.
Orbit Altitude - Высота орбиты на которую должна выйти ракета.
Orbit Inc - Наклон в градусах для конечной орбиты.
Маркер указывает направление автопилота, эта функция не работает.
Limit Q To - Уменьшить тягу если оказанное на ракету давление превысит указанное.
Параметр не может повлиять на твердотопливные ускорители.
Параметр не может повлиять на твердотопливные ускорители.
При избыточном давлении двигатели ограничивают свою тягу, но не ниже указанного процента. Нужно настроить если у ракеты отсутствуют гиродины или стабилизаторы, а контроль ориентацией аппарата в пространстве осуществляется только векторной тягой двигателей.
Параметр используется для шаттлов и аппаратов с неравномерным центром тяжести.
При снижении давления, автопилот начнет менять угол атаки для выхода на орбиту.
Параметр может пригодится если у ракеты плохой отклик на команды автопилота.
По умолчанию, сброс пустых ступеней происходит через 0.5 секунд после того, как в них закончилось топливо, а через одну секунду запуск двигателей следующей ступени.
Если вы хотите сбросить какую то ступень самостоятельно, укажите ее номер.
MechJeb сбросит ступени находящиеся до нее, а указанную ступень трогать не будет.
Auto-Deploy Antennas - Автоматическое развертывание антенн на орбите.
Auto-Warp - Автоматическое ускорение времени до следующего маневра.
Автопилот выведет ракету на заданную вами высоту Orbit Altitude, но включать двигатели для завершения маневра не будет, полет получится суборбитальным.
Полное описание этого параметра смотрите в главе - Ascent Guidance - Ascent Path Editor.
Select a Target for a Timed Launch - Выбрать цель для запуска по времени
Параметр отвечает за автоматический вывод ракеты на орбиту вблизи выбранной цели.Для его активации, сначала нужно выбрать цель на орбите. Нажмите кнопку "M" и выберите на карте объект, космическую станцию или ракету к которой вы хотите подлететь и нажмите "Установить цель".
Следующие параметры станут доступны только после выбора цели.
Launch Countdown - За какое время выключить ускорение и начать обратный отсчет?
Launch To Rendezvous - Запуск в цель. Этот параметр отвечает за запуск ракеты непосредственно к самой цели, так по завершению маневра ваше расстояние до цели будет минимальное, около одного километра.
Launch Into Plane Of Target - Запуск в плоскость цели.
Конечная орбита будет иметь такую же плоскость, направление, радиус как и у цели.
Для начала выберите цель на орбите. В окне Ascent Guidance отключите "TARG" и "OPTS". Далее выберите Launch To Rendezvous или Launch Into Plane Of Target, у вас появится обратный отсчет до старта. Осталось только отдать управление автопилоту, нужно нажать Engage Autopilot и время автоматически ускорится до момента взлета.Видео с использованием Launch To Rendezvous (Запуск в цель). 📺
Видео с использованием Launch Into Plane Of Target (Запуск в плоскость цели). 📺
Ascent Guidance - Интерфейс
В Ascent Guidance очень много параметров и большинство из них настраиваются единожды.Поэтому неиспользуемые параметры можно частично скрыть или показать.
TARG - Кнопка показывает целевую орбиту и ее наклон, а с выбранной целью ее параметры.
OPTS - Опции. С зажатой кнопкой отображаются все настройки и параметры описанные выше.
Ascent Guidance - Ascent Path Editor
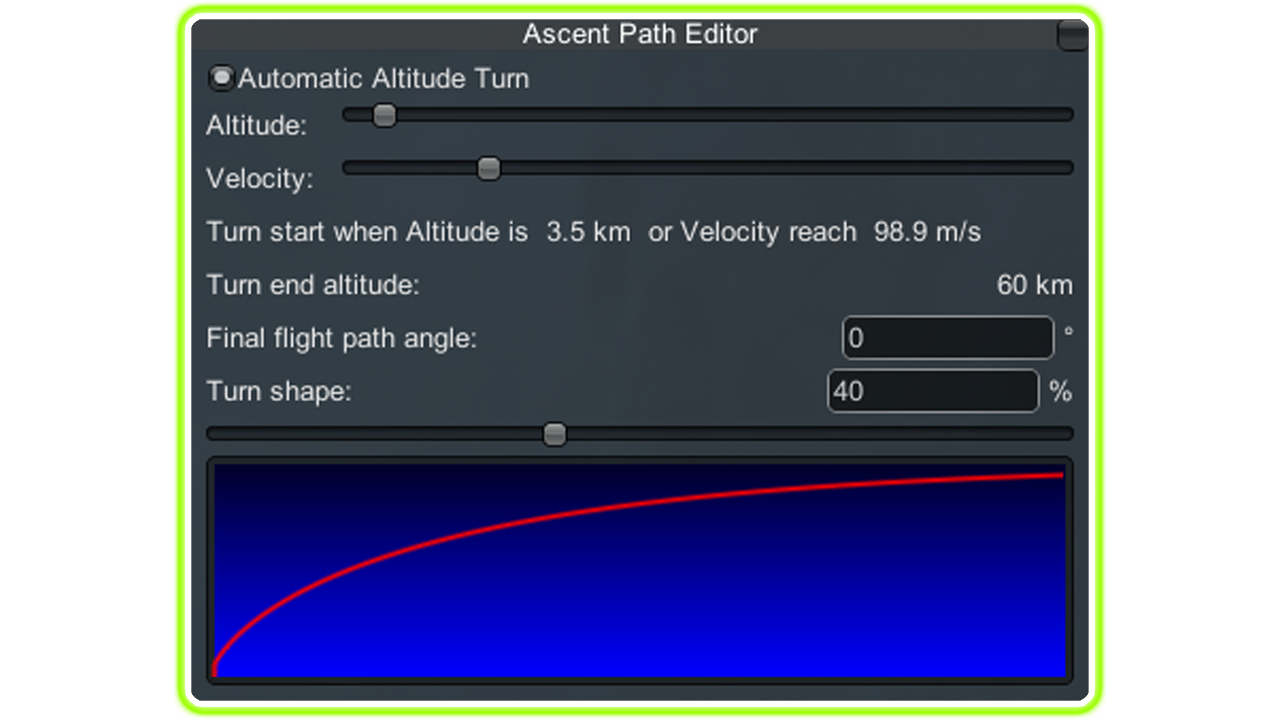 В автоматическом режиме, устанавливается высота и скорость.
В автоматическом режиме, устанавливается высота и скорость.Altitude - Высота над уровнем моря
Velocity - Скорость
Final Flight Path Angle - Финальный угол траектории полета.
Turn Shape - Плавность угла тангажа для выхода на орбиту.
Маневр выхода на орбиту начнется когда высота или скорость достигнет указанной.
Красная линия показывает предполагаемую траекторию взлета, белая линия показывает текущую траекторию полета. Белая линия появится при старте ракеты.
Ascent Path Editor - Ручной режим
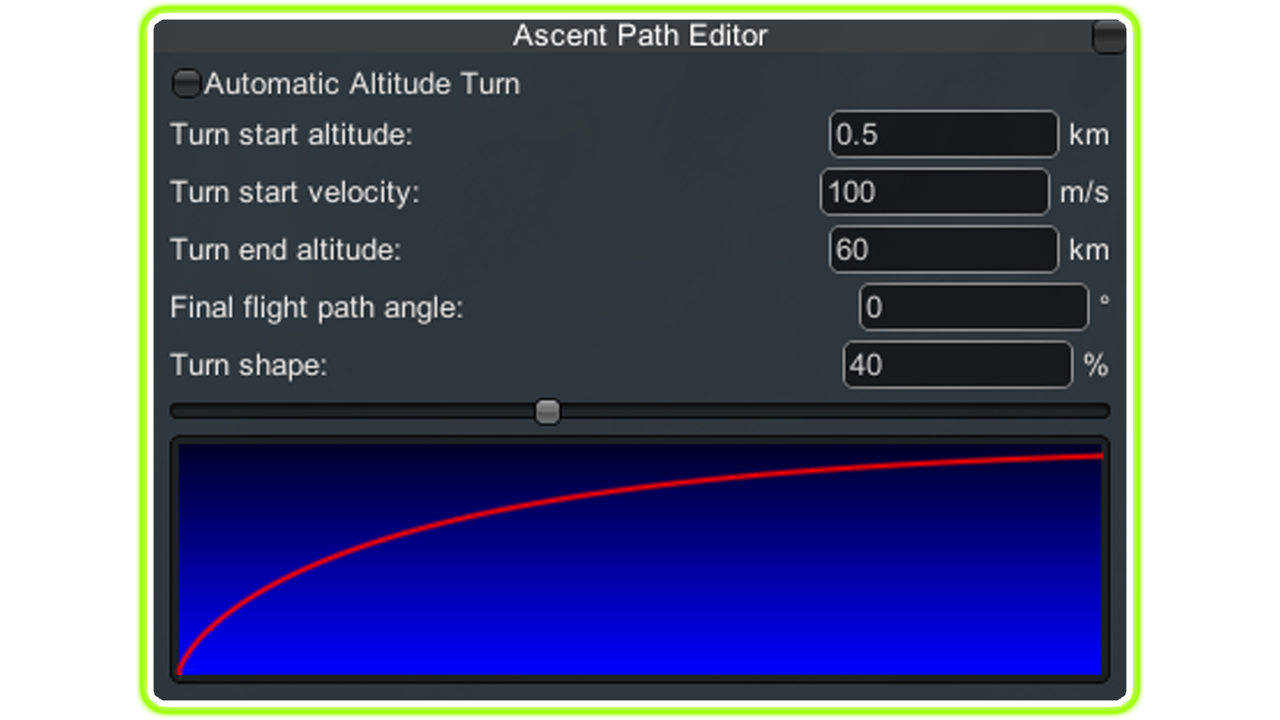 Automatic Altitude Turn - Отключить автоматический режим.
Automatic Altitude Turn - Отключить автоматический режим.Turn Start Altitude - По достижению указанной высоты, аппарат начнет поворот.
Turn Start Velocity - Или поворот начнется по достижению указанной скорости.
Turn End Altitude - На этой высоте угол тангажа зафиксируется на значении, указанном ниже.
Final Flight Path Angle - Финальный угол траектории полета.
По умолчанию, аппарат достигший предыдущего значения летит с наклоном в 0 градусов.
Turn Shape - Плавность угла наклона аппарата.
Ascent Guidance - Профили
Мне не хватило места, чтобы уместить все в одном разделе. В Ascent Guidance есть вкладка с профилями, всего их три. О первом, главном классическом профиле "Classic Ascent Profile", я уже рассказал в разделе выше. Информация о двух других профилях содержится здесь.
Stock-Style GravityTurn™
У этого профиля есть параметр Intermediate Altitude, он отвечает за биэллиптическую переходную орбиту. В некоторых случаях биэллиптический переход требует меньших затрат Delta-V чем взлет, с использованием Classic Ascent Profile. Stock-Style GravityTurn™, профиль, который выполняет выход на орбиту в три этапа.
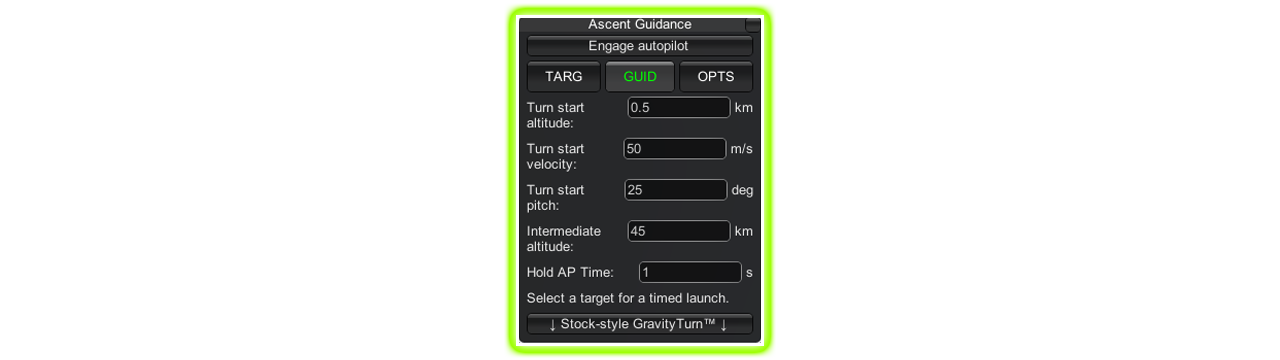
Turn Start Altitude - По достижению указанной высоты изменить угол атаки.
Начальная высота в километрах, по ее достижению начать гравитационный поворот.
Более высокие значения для ракет с меньшей тяговооруженностью.
Turn Start Velocity - Начать гравитационный разворот по достижению указанной скорости.
Начальная скорость поворота для гравитационного маневра.
Более высокие значения для ракет с меньшей тяговооруженностью.
Turn Start Pitch - Изменить угол тангажа.
С такого угла тангажа начнётся гравитационный разворот.
Intermediate Altitude - Промежуточная высота.
Промежуточная высота апогея, затем, повышение апогея до конечной конечной целевой орбиты.
Может быть установлен равным конечной цели, чтобы пропустить промежуточную фазу.
Hold AP Time - Сколько времени держатся на промежуточной высоте.
С большим промежутком оставшегося времени до апоцентра, двигатель будет прожигать топливо, направляя сопло вниз, что бы удержать высоту апоцентра. Это схоже на выполнения заданного узла маневра, но с дросселированием вниз в случае, когда игрок инициировал горение слишком рано.
Select a Target For a Timed Launch - Выберите цель для запуска по времени.
Primer Vector Guidance (RSS/RO)
Primer Vector Guidance это реальные алгоритмы гравитационного поворота из миссий Surveyor, которые правильно интегрируют траекторию. Скорее всего, этот профиль не будет таким полезным в Kerbal Space Program, так как он не умеет выполнять двухэтапный выход на орбиту. Поэтому, большинство ракет-носителей непригодны для управления, так как, если вы даете орбиту 100 на 100, то вам нужна ступень, которая будет гореть непрерывно, 100% тяга без дросселирования, до тех пор, пока вы не достигните орбиты 100 на 100, затем двигатели выключатся. Видео с использованием Primer Vector Guidance. 📺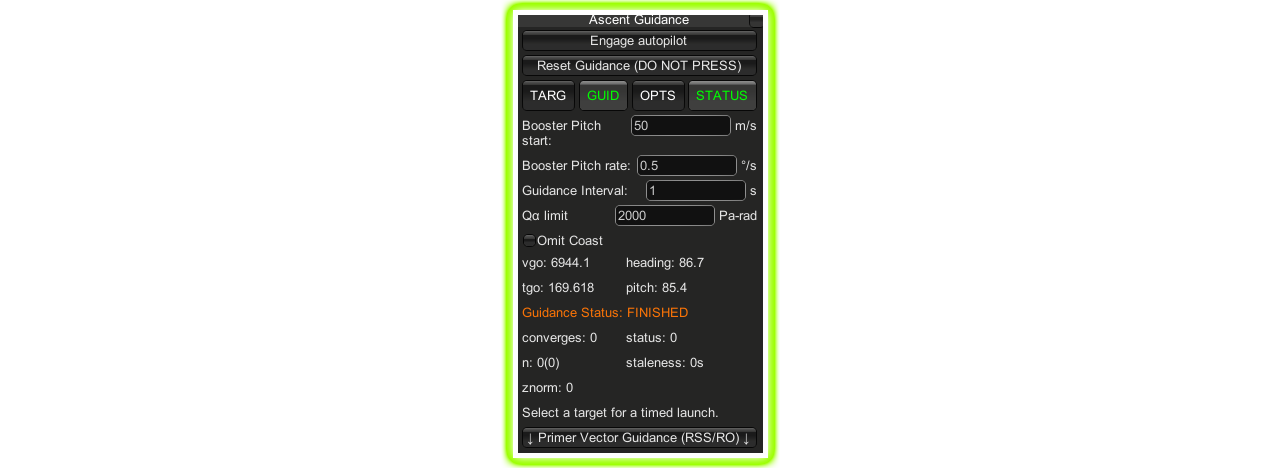
Reset Guidance (DO NOT PRESS) - Сброс навигации. Не нажимать!
Booster Pitch Start - Стартовая подача.
Booster Pitch Rate - Коэффициент усиления бустера.
Guidance Interval - Интервал навигации.
Qa Limit - Что это?
Omit Coast - Что это?
Attitude Adjustment - Регулировка ориентации
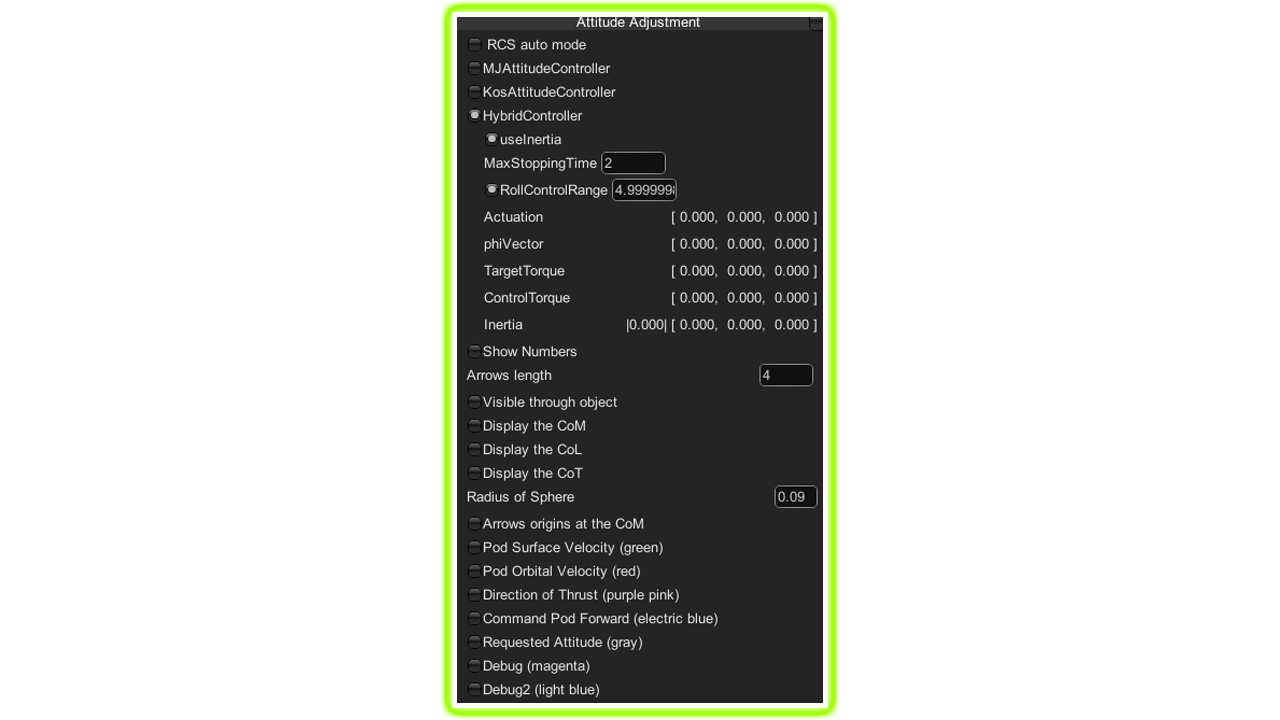 Регулировка ориентации и точная настройка отклика на управление осуществляется здесь.
Регулировка ориентации и точная настройка отклика на управление осуществляется здесь. Обычному игроку, этот модуль скорее всего не пригодиться, а знакомые с авиамоделированием и настройкой дистанционно управляемых ЛА, разберутся без моих скудных познаний.
Поэтому я перевел самые простые параметры, которые могут пригодиться обычному игроку.
MJ Attitude Controller - Контроль ориентации.
Kos Attitude Controller - Позволяет самостоятельно писать программный код.
Hybrid Controller - Гибридный контроллер.
Visible Through Object - Видимость сквозь аппарат.
Attitude Adjustment отображает их в реальном времени, в полете.
Display The CoM - Центр массы. (Красный шар).
Display The CoL - Центр подъемной силы. (Синий шар).
Display The CoT - Вектор тяги - (Желтый шар).
Radius of Sphere - Радиус сферы отображения.
Pod Surface Velocity (Green) - Направление движения. (Зеленая стрелка).
Pod Orbital Velocity (Red) - Направление орбитальной скорости. (Красная стрелка).
Direction Of Thrust (Purple Pink) - Направление тяги. (Фиолетовая стрелка).
Command Pod Forward (Electrio Blue) - Направление носа аппарата (Синяя стрелка).
Requested Attitude (Gray) - Требуемое отношение. (Серая стрелка).
Debug (Magenta) - Отладка. (Пурпурная стрелка).
Debug2 (Light Blue) - Направление на место старта. (Голубая стрелка).
Custom Window Editor - Редактор окон
Настройка окон. В Custom Window Editor можно изменять прозрачность окон, менять их цвет и цвет текста. Создавать новые окна, удалять, блокировать их перемещение. 📺
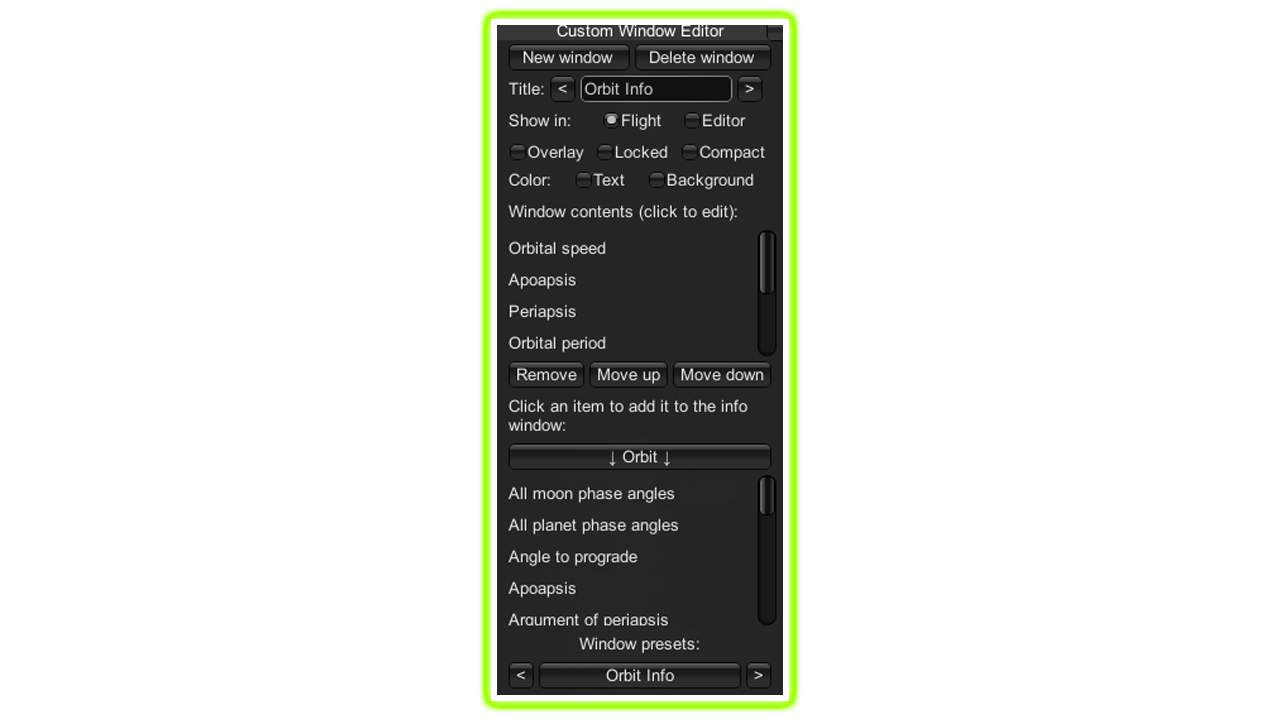
New Window - Создает новое окно
Delete Window - Удаляет окно которое находится ниже в графе Title.
Overlay - Убирает рамки.
Locked - Блокирует перемещение окна.
Compact - Делает интервал между строк более сжатым.
Color - Изменить цвет "Text" (текст), "Background" (задний фон).
"Window Contents Click To Edit" - Тут отображается содержащийся список параметров в окне. Их можно менять местами кнопками Move Up, Move Down. Или удалить нажав Remove.
"Click An Item To Add It To The Info Window" - Ниже находится список окон и их содержание. Можно создать свое окно "New Window", а далее добавьте в него параметры из списка окон.
"Window Presets" - Содержит готовые окна. Их можно добавить отсюда, если вы что то удалили.
New Window - Создает новое окно
Delete Window - Удаляет окно которое находится ниже в графе Title.
Overlay - Убирает рамки.
Locked - Блокирует перемещение окна.
Compact - Делает интервал между строк более сжатым.
Color - Изменить цвет "Text" (текст), "Background" (задний фон).
"Window Contents Click To Edit" - Тут отображается содержащийся список параметров в окне. Их можно менять местами кнопками Move Up, Move Down. Или удалить нажав Remove.
"Click An Item To Add It To The Info Window" - Ниже находится список окон и их содержание. Можно создать свое окно "New Window", а далее добавьте в него параметры из списка окон.
"Window Presets" - Содержит готовые окна. Их можно добавить отсюда, если вы что то удалили.
Docking Autopilot - Стыковка
Docking Autopilot автоматически проводит стыковку в космосе. 📺
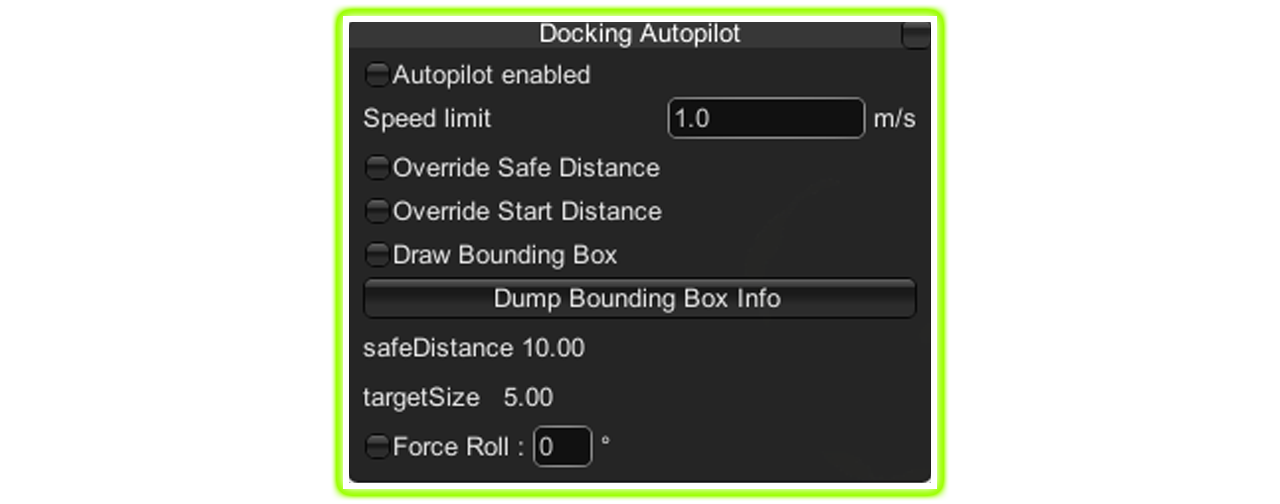 Для активации параметров, сначала нужно выбрать цель.
Для активации параметров, сначала нужно выбрать цель.
Autopilot Enabled - Включение автопилота.
Speed limit - Скорость сближения.
Override Safe Distance - Безопасное расстояние.
Override Start Distance - Начальное расстояние.
Draw Bounding Box - Показать ограничивающую рамку.
"Dump Bounding Box Info" - Информация о рамке.
"Safe Distance" - Безопасное расстояние.
"Target Size" - Размер цели.
"Force Roll" - Крен относительно цели.
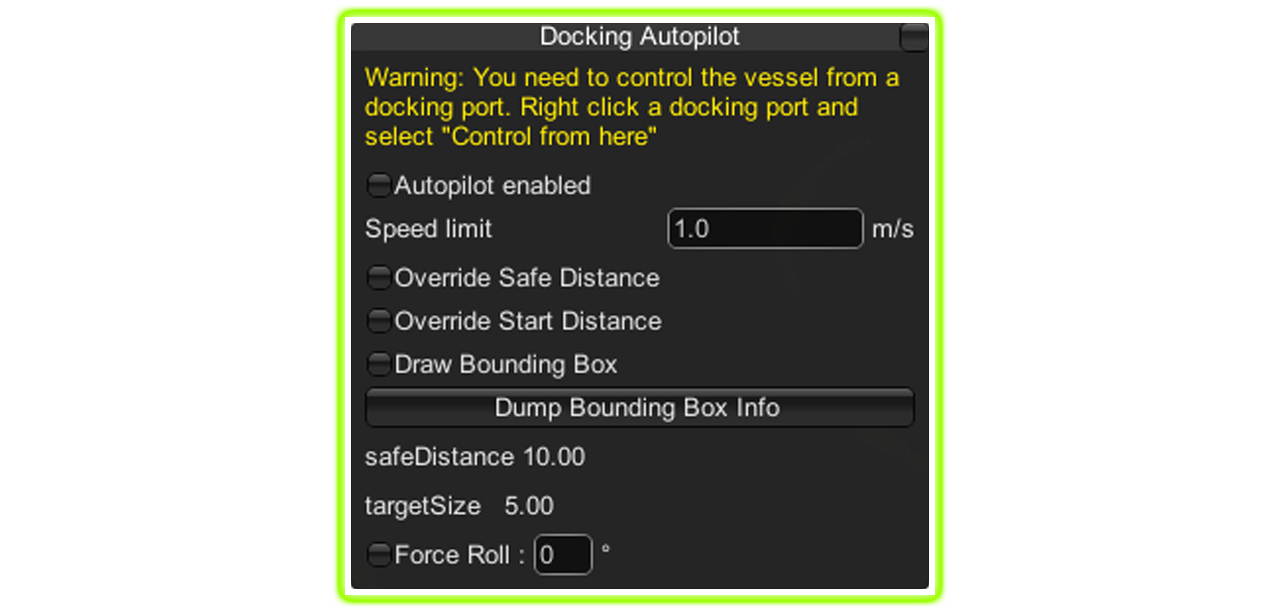
![]() Перед стыковкой нужно выбрать стыковочный порт вашего корабля, нажать на него правой кнопкой мышки, а далее выбрать в меню "Управлять отсюда". Если этого не сделать загорится предупреждающая надпись.
Перед стыковкой нужно выбрать стыковочный порт вашего корабля, нажать на него правой кнопкой мышки, а далее выбрать в меню "Управлять отсюда". Если этого не сделать загорится предупреждающая надпись.
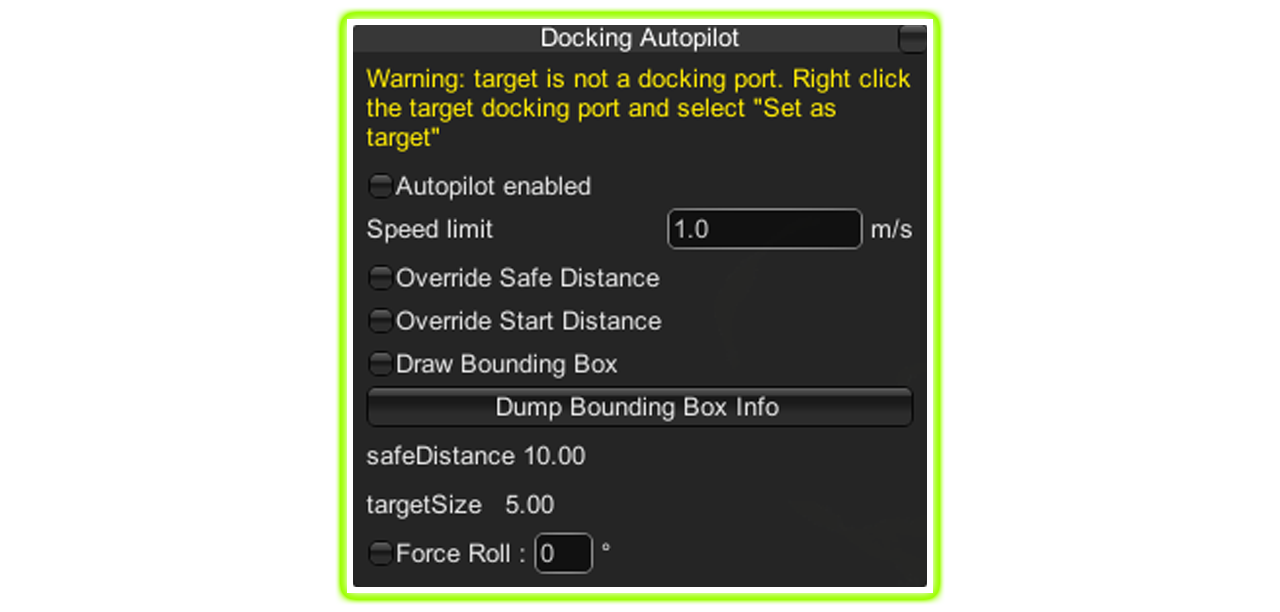
![]() Если вы находитесь далеко от цели, то у вас не получится выбрать стыковочный порт цели к которому нужно пристыковаться. В таком случае будет предупреждение "Цель не является стыковочным портом. Щелкните правой кнопкой мыши по стыковочному порту цели и выберите "Задать цель"". Несмотря на это предупреждение, автопилот будет работать и сам выберет стыковочный порт. Но стоит учитывать то, что автопилот может выбрать и занятый стыковочный порт. Поэтому не игнорируйте предупреждение.
Если вы находитесь далеко от цели, то у вас не получится выбрать стыковочный порт цели к которому нужно пристыковаться. В таком случае будет предупреждение "Цель не является стыковочным портом. Щелкните правой кнопкой мыши по стыковочному порту цели и выберите "Задать цель"". Несмотря на это предупреждение, автопилот будет работать и сам выберет стыковочный порт. Но стоит учитывать то, что автопилот может выбрать и занятый стыковочный порт. Поэтому не игнорируйте предупреждение.
 Видео стыковки вблизи объекта. 📺
Видео стыковки вблизи объекта. 📺
Для активации параметров, сначала нужно выбрать цель.Autopilot Enabled - Включение автопилота.
Speed limit - Скорость сближения.
Override Safe Distance - Безопасное расстояние.
Override Start Distance - Начальное расстояние.
Draw Bounding Box - Показать ограничивающую рамку.
"Dump Bounding Box Info" - Информация о рамке.
"Safe Distance" - Безопасное расстояние.
"Target Size" - Размер цели.
"Force Roll" - Крен относительно цели.
Видео стыковки вблизи объекта. 📺
Flight Recorder - Регистратор полетов
Flight Recorder как бортовой самописец, он записывает и отображает информацию о количестве ресурсов на борту, высоте, массе и скорости в виде графиков. 📺
![]()
![]()
Downrange - Переключение построения графиков перечисленных величин, либо от горизонтального расстояния до точки старта Downrange, либо от времени.
Time - Время со старта или с момента сброса Flight Recorder.
Downrange - Расстояние от точки начала полета или с момента сброса.
Mark - Сбросить данные.
Reset Scale - Сбросить масштаб.
![]()
Real Atmo - Изменяет градиент заднего фона, который отображает вашу настоящую высоту.
![]()
Altitude - Высота над уровнем моря.
True Altitude - Высота с учетом рельефа местности.
Acceleraton - Ускорение.
Surface Speed - Скорость.
Orbital Spead - Орбитальная скорость.
Mass - Масса.
Q - Аэродинамическое давление.
AoA - Положительный угол атаки.
AoS - Отрицательный угол атаки.
AoD - Рысканье.
Pitch - Угол тангажа.
ΔV - Расход ΔV.
Gravity Loss - Гравитационные потери ΔV.
Drag Loss - Потери ΔV из за сопротивления атмосферы.
Steering Loss - Потери ΔV на изменение ориентации.
![]() Подробное описание Q, Gravity Loss, Drag Loss и Steering Loss.
Подробное описание Q, Gravity Loss, Drag Loss и Steering Loss.
Большое спасибо Кириллу Петрянкину за объяснение.
Q
Аэродинамическое давление зависит от плотности воздуха и от скорости. Когда вы взлетаете плотность падает медленно, а скорость растёт быстро, поэтому график быстро возрастает. Плотность падает экспоненциально от высоты. В какой-то момент плотность начинает падать настолько быстро, что даже дальнейшее увеличение скорости не даёт увеличения Q. При дальнейшем подъёме Q падает. Максимум графика Q, когда Q заканчивает расти и начинает падать, называют "MaxQ" - максимальное аэродинамическое давление. На трансляциях запусков часто говорят "reached Max Q" или "passed Max Q", чтобы обозначить, что после этой точки ракета может развалиться от сопротивления воздуха с меньшей вероятностью, чем до неё.
![]() Gravity Loss
Gravity Loss
Когда вы зависаете на одной высоте, то TWR = 1 и вектор тяги двигателей направлен вертикально вниз. Двигатели работают только против силы тяжести, ΔV тратится, но вы не поднимаетесь и не разгоняетесь. Вся ΔV была потрачена на борьбу с гравитацией. Когда TWR > 1, то вы начинаете разгоняться вверх, но разгоняет вас только та часть тяги, которая превышает силу тяжести, остальная часть тяги также бесполезно борется с гравитацией. Вот и получается, что полезную работу совершает только та часть тяги, (и ΔV соответственно) которая превышает силу тяжести. То есть гравитационные потери будут тем меньше, чем больше будет TWR. Когда вы начинаете наклоняться, то вектор тяги уже направлен под углом к вектору силы тяжести, и вертикальная проекция вектора тяги разгоняет тебя вверх, а горизонтальная - в бок. По сути, чем дольше присутствует эта вертикальная проекция вектора тяги, тем больше будут гравитационные потери, поэтому нужно стараться как можно быстрей выводить ракету в горизонт, чтобы ΔV тратилась на горизонтальный разгон, а не на борьбу с гравитацией.
![]() Drag Loss
Drag Loss
Чем больше Q и угол атаки, тем больше. Для уменьшения можно снижать тягу перед MaxQ и отклонять нос от вектора скорости на как можно меньший угол.
![]() Steering Loss
Steering Loss
Сюда входит любая ΔV, потраченная не на разгон корабля, а на изменение его ориентации. Например, двигатель с управляемым вектором тяги. В не отклонённом положении вектор тяги направлен ровно через центр масс, но когда вектор отклоняется, возникает момент силы, вращающий корабль. Опять же, часть тяги (и ΔV соответственно) продолжает разгонять корабль, а другая часть придаёт ему вращение, т.е. не разгоняет его. Или другой пример, когда для изменения ориентации используются не гиродины, а двигатели ориентации.
![]()
Первая строчка
Pause - Пауза записи.Downrange - Переключение построения графиков перечисленных величин, либо от горизонтального расстояния до точки старта Downrange, либо от времени.
Time - Время со старта или с момента сброса Flight Recorder.
Downrange - Расстояние от точки начала полета или с момента сброса.
Mark - Сбросить данные.
Reset Scale - Сбросить масштаб.
Вторая строчка
Auto Scale - Формат отображения графиков, правее изменяется масштаб окна.Real Atmo - Изменяет градиент заднего фона, который отображает вашу настоящую высоту.
Обозначения отображающиеся на графике
Stages - Сброс ступени.Altitude - Высота над уровнем моря.
True Altitude - Высота с учетом рельефа местности.
Acceleraton - Ускорение.
Surface Speed - Скорость.
Orbital Spead - Орбитальная скорость.
Mass - Масса.
Q - Аэродинамическое давление.
AoA - Положительный угол атаки.
AoS - Отрицательный угол атаки.
AoD - Рысканье.
Pitch - Угол тангажа.
ΔV - Расход ΔV.
Gravity Loss - Гравитационные потери ΔV.
Drag Loss - Потери ΔV из за сопротивления атмосферы.
Steering Loss - Потери ΔV на изменение ориентации.
Большое спасибо Кириллу Петрянкину за объяснение.
Q
Аэродинамическое давление зависит от плотности воздуха и от скорости. Когда вы взлетаете плотность падает медленно, а скорость растёт быстро, поэтому график быстро возрастает. Плотность падает экспоненциально от высоты. В какой-то момент плотность начинает падать настолько быстро, что даже дальнейшее увеличение скорости не даёт увеличения Q. При дальнейшем подъёме Q падает. Максимум графика Q, когда Q заканчивает расти и начинает падать, называют "MaxQ" - максимальное аэродинамическое давление. На трансляциях запусков часто говорят "reached Max Q" или "passed Max Q", чтобы обозначить, что после этой точки ракета может развалиться от сопротивления воздуха с меньшей вероятностью, чем до неё.
Когда вы зависаете на одной высоте, то TWR = 1 и вектор тяги двигателей направлен вертикально вниз. Двигатели работают только против силы тяжести, ΔV тратится, но вы не поднимаетесь и не разгоняетесь. Вся ΔV была потрачена на борьбу с гравитацией. Когда TWR > 1, то вы начинаете разгоняться вверх, но разгоняет вас только та часть тяги, которая превышает силу тяжести, остальная часть тяги также бесполезно борется с гравитацией. Вот и получается, что полезную работу совершает только та часть тяги, (и ΔV соответственно) которая превышает силу тяжести. То есть гравитационные потери будут тем меньше, чем больше будет TWR. Когда вы начинаете наклоняться, то вектор тяги уже направлен под углом к вектору силы тяжести, и вертикальная проекция вектора тяги разгоняет тебя вверх, а горизонтальная - в бок. По сути, чем дольше присутствует эта вертикальная проекция вектора тяги, тем больше будут гравитационные потери, поэтому нужно стараться как можно быстрей выводить ракету в горизонт, чтобы ΔV тратилась на горизонтальный разгон, а не на борьбу с гравитацией.
Чем больше Q и угол атаки, тем больше. Для уменьшения можно снижать тягу перед MaxQ и отклонять нос от вектора скорости на как можно меньший угол.
Сюда входит любая ΔV, потраченная не на разгон корабля, а на изменение его ориентации. Например, двигатель с управляемым вектором тяги. В не отклонённом положении вектор тяги направлен ровно через центр масс, но когда вектор отклоняется, возникает момент силы, вращающий корабль. Опять же, часть тяги (и ΔV соответственно) продолжает разгонять корабль, а другая часть придаёт ему вращение, т.е. не разгоняет его. Или другой пример, когда для изменения ориентации используются не гиродины, а двигатели ориентации.
Landing Guidance - Руководство по посадке
Модуль Landing Guidance предназначен для автоматизации и упрощения процесса посадки, как с использованием парашюта, так и двигателей. Для посадки в определенном месте можно ввести координаты, выбрать место на карте, или цель, рядом с которой будет выполнена посадка. При нецелевой посадке, автопилот сам выбирает место приземления. 📺
 Enter Target Coordinates - Ввести координаты посадки.
Enter Target Coordinates - Ввести координаты посадки.
При вводе координат, на карте вы будете визуально отслеживать маркер места посадки.
Кнопки смещения полезны для предотвращения посадки вашего корабля поверх другого.
Кнопки имеют шаг в 10 метров, ими можно перемещать маркер до активации автопилота.
Под координатами маркера будет отображаться высота от уровня моря и название локации.
![]() Pick Target On Map - Указать место посадки на карте.
Pick Target On Map - Указать место посадки на карте.
![]() Следующие меню отображается только если вы находитесь на Кербине или его орбите.
Следующие меню отображается только если вы находитесь на Кербине или его орбите.
Ниже, можно выбрать место для посадки на Кербине. Всего их четыре.
KSC Pad - Стартовая площадка Кербал Спейс Центра.
VAB - Аэродром Кербал Спейс Центра.
Desert - Аэродром в пустыне.
Woomerang - Стартовая площадка Бумеранг.
Кнопка Set - Подтверждает выбранное место.
![]() Show Landing Predictions - Показать прогнозы на посадку.
Show Landing Predictions - Показать прогнозы на посадку.
Show Aerobrake Nodes - Спрогнозировать орбиту с учетом трения об атмосферу.
Show trajectory - Показать траекторию снижения.
World Trajectory - Показать траекторию с просчетом аэродинамики крыльев.
Camera Trajectory (WIP) - Маркер показывающий место посадки.
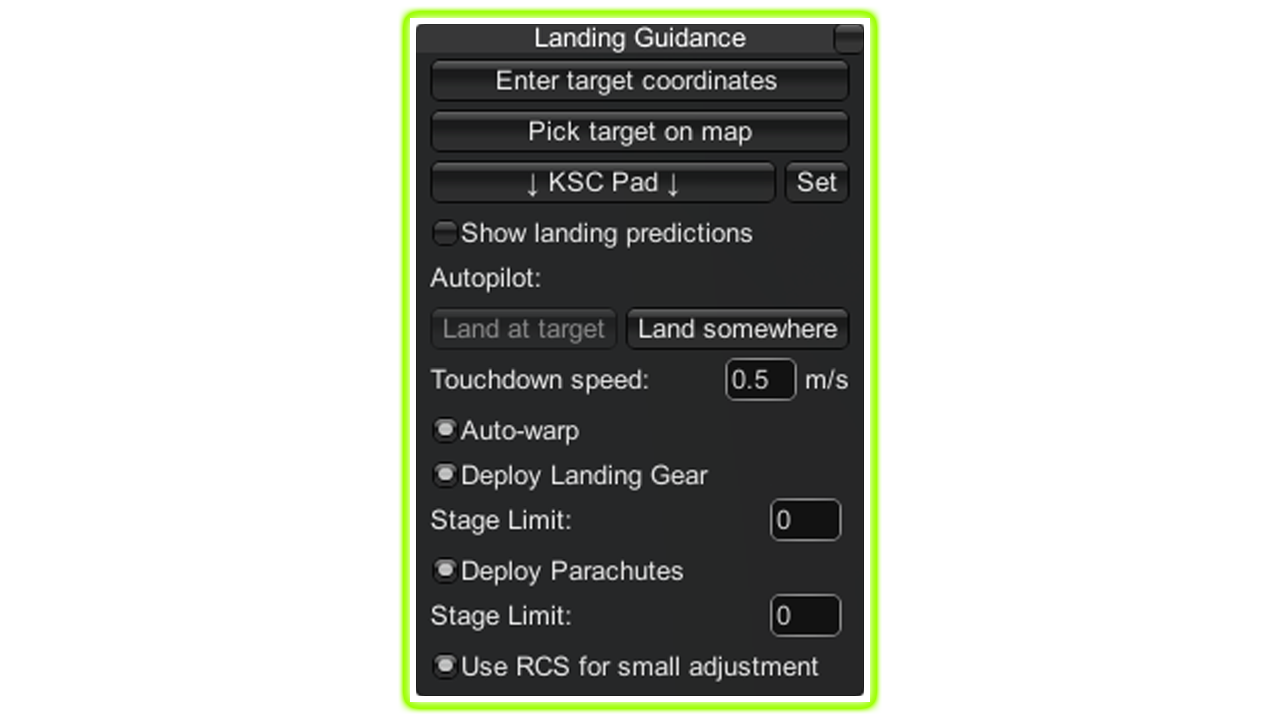
![]() Land At Target - Приземлится в указанную цель.
Land At Target - Приземлится в указанную цель.
Land Somewhere - Приземлится где нибудь, автопилот сам выберет место.
Touchdown Speed - Скорость касания с поверхностью.
Auto-Warp - Автоматическое ускорение времени.
Deploy Landing Gear - Автоматический выпуск посадочных стоек.
Stage Limit - Выпуск посадочных стоек до определенной ступени.
Deploy Parachutes - Автоматическое развертывание парашютов.
Stage Limit - Открытие парашютов до определенной ступени.
Use RCS For Small Adjustment - Использовать двигатели РСУ для небольшой корректировки.
![]() Некоторая информация появится когда автопилот активирован.
Некоторая информация появится когда автопилот активирован.
Исключением является автоматическая посадка.
Landing Predictions - Прогноз посадки.
Ниже написаны предполагаемые координаты посадки.
Высота над уровнем моря.
Название игровой локации.
Target Difference - Разница в расстоянии относительно цели.
Max Drag - Максимальная тяга.
Delta-V Needed - Требуемое количество Delta-V для посадки.
Time To Land - Время до посадки.
Enter Target Coordinates - Ввести координаты посадки.При вводе координат, на карте вы будете визуально отслеживать маркер места посадки.
Кнопки смещения полезны для предотвращения посадки вашего корабля поверх другого.
Кнопки имеют шаг в 10 метров, ими можно перемещать маркер до активации автопилота.
Под координатами маркера будет отображаться высота от уровня моря и название локации.
Ниже, можно выбрать место для посадки на Кербине. Всего их четыре.
KSC Pad - Стартовая площадка Кербал Спейс Центра.
VAB - Аэродром Кербал Спейс Центра.
Desert - Аэродром в пустыне.
Woomerang - Стартовая площадка Бумеранг.
Кнопка Set - Подтверждает выбранное место.
Show Aerobrake Nodes - Спрогнозировать орбиту с учетом трения об атмосферу.
Show trajectory - Показать траекторию снижения.
World Trajectory - Показать траекторию с просчетом аэродинамики крыльев.
Camera Trajectory (WIP) - Маркер показывающий место посадки.
Land Somewhere - Приземлится где нибудь, автопилот сам выберет место.
Touchdown Speed - Скорость касания с поверхностью.
Auto-Warp - Автоматическое ускорение времени.
Deploy Landing Gear - Автоматический выпуск посадочных стоек.
Stage Limit - Выпуск посадочных стоек до определенной ступени.
Deploy Parachutes - Автоматическое развертывание парашютов.
Stage Limit - Открытие парашютов до определенной ступени.
Use RCS For Small Adjustment - Использовать двигатели РСУ для небольшой корректировки.
Исключением является автоматическая посадка.
Landing Predictions - Прогноз посадки.
Ниже написаны предполагаемые координаты посадки.
Высота над уровнем моря.
Название игровой локации.
Target Difference - Разница в расстоянии относительно цели.
Max Drag - Максимальная тяга.
Delta-V Needed - Требуемое количество Delta-V для посадки.
Time To Land - Время до посадки.
Maneuver Node Editor - Редактор маневренных узлов
В окне Maneuver Node Editor можно с большой точностью настроить ваш предстоящий маневр.
Для активации окна, сначала нужно создать маневр. 📺
Нажать левой кнопкой мышки на свою орбиту, а далее "Добавить маневр".
 Первые три параметра отвечают за изменение предстоящего маневра.
Первые три параметра отвечают за изменение предстоящего маневра.
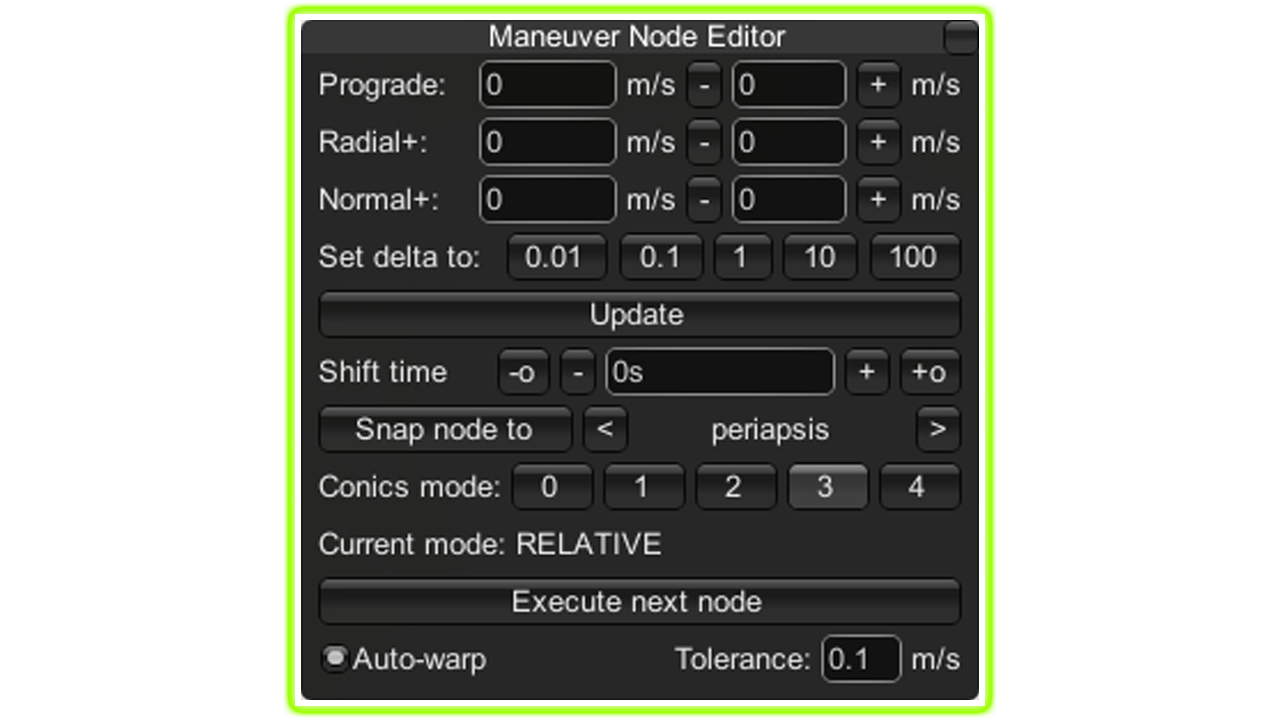
Prograde - По движению, против движения.
Radial - Радиально наружу, Радиально внутрь.
Normal - Нормаль, Антинормаль.
В окошках слева отображаются внесенные вами изменения, если вы захотите сбросить их, просто выставите все по нулям. По нажатию кнопок Минус и Плюс изменяется орбита, а окошки справа отображают шаг на который будет изменяться орбита. Можно ввести свое значение или выбрать уже готовое нажав кнопки напротив Set Delta To.
![]() Update - Если вы вручную ввели значение, этой кнопкой подтверждаются и вносятся изменения.
Update - Если вы вручную ввели значение, этой кнопкой подтверждаются и вносятся изменения.
Shift Time - Кнопками Минус и Плюс можно изменять время начала вашего маневра, а в окне выставляется время, на сколько будет переносится предстоящий маневр.
Snap Node To - Привязать узел. Привязать к апоцентру или перицентру.
Conics Mode - Режим отрисовки траекторий. Изменения будут заметны тогда, когда ваша траектория будет пересекаться со сферой влияния другого небесного тела.
0 - Локальный. Небесное тело.
1 - Локальный. Вход в сферу тяготения.
2 - Локальный. Выход из сферы тяготения.
3 - Относительный.
4 - Динамический.
![]() Current Mode - Текущий режим.
Current Mode - Текущий режим.
Execute Next Node - Выполнить следующий маневр.
Auto-Warp - Автоматическое ускорение времени.
Tolerance - Допустимое отклонение.
Для активации окна, сначала нужно создать маневр. 📺
Нажать левой кнопкой мышки на свою орбиту, а далее "Добавить маневр".
Первые три параметра отвечают за изменение предстоящего маневра.Prograde - По движению, против движения.
Radial - Радиально наружу, Радиально внутрь.
Normal - Нормаль, Антинормаль.
В окошках слева отображаются внесенные вами изменения, если вы захотите сбросить их, просто выставите все по нулям. По нажатию кнопок Минус и Плюс изменяется орбита, а окошки справа отображают шаг на который будет изменяться орбита. Можно ввести свое значение или выбрать уже готовое нажав кнопки напротив Set Delta To.
Shift Time - Кнопками Минус и Плюс можно изменять время начала вашего маневра, а в окне выставляется время, на сколько будет переносится предстоящий маневр.
Snap Node To - Привязать узел. Привязать к апоцентру или перицентру.
Conics Mode - Режим отрисовки траекторий. Изменения будут заметны тогда, когда ваша траектория будет пересекаться со сферой влияния другого небесного тела.
0 - Локальный. Небесное тело.
1 - Локальный. Вход в сферу тяготения.
2 - Локальный. Выход из сферы тяготения.
3 - Относительный.
4 - Динамический.
Execute Next Node - Выполнить следующий маневр.
Auto-Warp - Автоматическое ускорение времени.
Tolerance - Допустимое отклонение.
Maneuver Planner - Планировщик маневров
В Maneuver Planner содержится много модулей для разного типа задач, я создал заголовки для первостепенных модулей, чтобы было проще и понятнее рассказать об их функциях и значении.
![]()
Как правило, такое временное окно для маневра открывается довольно редко, раз в год, а то и еще реже. Для активации модуля необходимо выбрать в качестве цели планету, на которую вы собрались лететь. Градиентная карта показывает расход ΔV в определенных временных промежутках. Синим цветом отображаются промежутки времени в которые вы потратите наименьшее количество топлива на маневр. Чтобы приблизить карту, нужно зажать на ней левую кнопку мышки и выбрать область увеличения. Под картой, в левом углу, отображается значение ΔV, когда вы перемещаете курсор по карте, это значение меняется. В правом углу кнопка Reset, она отвечает за сброс масштаба карты. Напротив надписи Select есть две кнопки Lowest ΔV и ASAP. Первая, Lowest ΔV автоматически выбирает окно старта с самыми наименьшими затратами ΔV, а ASAP ближайшее для вылета окно. Топлива вы потратите больше, чем в первом случае, зато вылетите раньше. Ниже, Departure In и Transit Duration, это время ожидания маневра и время в пути. Время изменится, если вы будете водить мышкой по карте или выберите Lowest ΔV или ASAP. Клик по карте, а затем по кнопке Create Node, создаст узел манёвра.
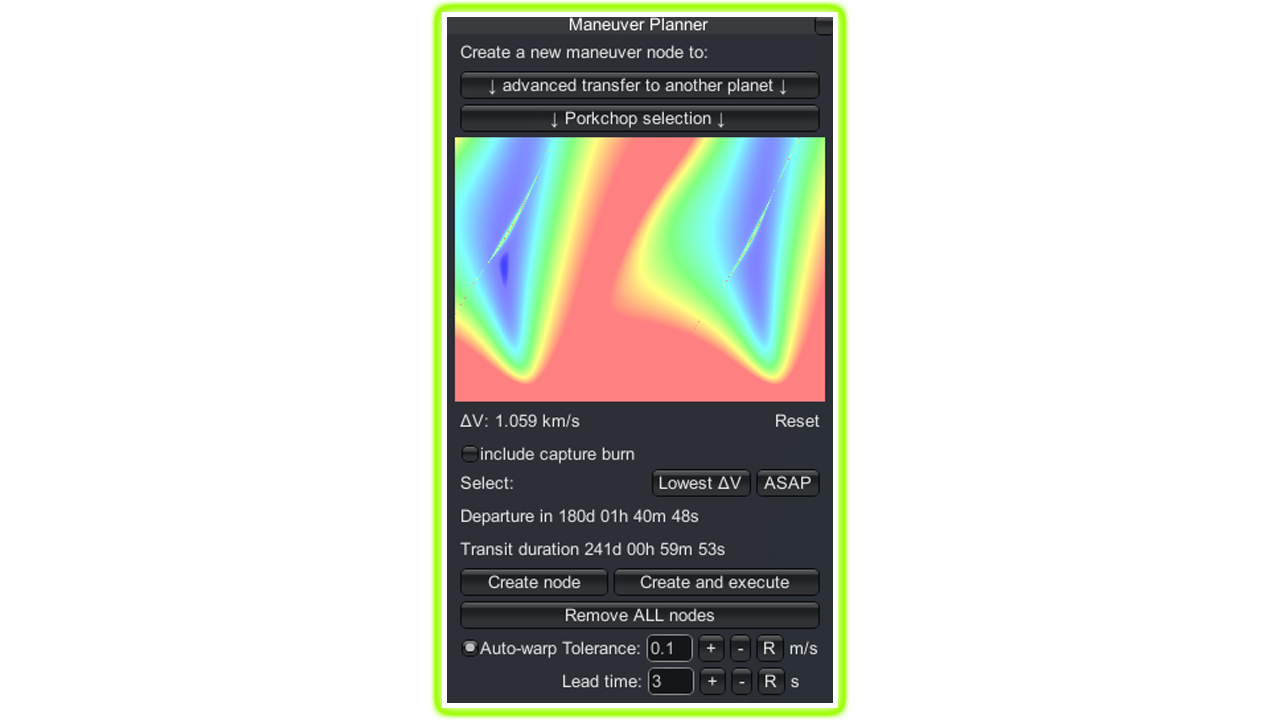 Porkchop Selection - Переключение режима работы.
Porkchop Selection - Переключение режима работы.
Include Capture Burn - Показывать затраты ΔV на торможение у планеты назначения.
Lowest ΔV - Самый низкий ΔV.
ASAP - Как можно скорее.
Departure In - Маневр через.
Transit Duration - Длительность перелета.
Create Node - Создать узел маневра.
Create And Execute - Создать и выполнить.
Remove ALL Nodes - Удалить узлы маневра.
Auto-Warp - Автоматическое ускорение времени.
Tolerance - Допустимое отклонение.
Lead Time - Время выполнения.
![]()
Допустим 25y 100d 04h 25m 40s (25 лет, 100 дней, 4 часа, 25 минут и 40 секунд).
Maneuver Planner подберет оптимальное окно с наименьшими затратами ΔV к этой дате.
 Max Arrival Time - Максимальное время прибытия.
Max Arrival Time - Максимальное время прибытия.
![]()
 Intercept Only, No Capture Burn (Impact/Flyby) - Только перехват цели.
Intercept Only, No Capture Burn (Impact/Flyby) - Только перехват цели.
Simple Coplanar Hohmann Transfer - Простой компланарный переход.
Fractional Target Period Offset - Смещение узла маневра.
![]() Schedule The Burn - Выбрать условие для старта.
Schedule The Burn - Выбрать условие для старта.
At The Optimum Time - В оптимальное время.
At The Next Periapsis - На следующем перицентре.
At The Next Apoapsis - На следующем апоцентре.
After a Fixed Time - После фиксированного времени.
At An Altitude - На высоте.
At The Equatorial DN - В экваториальной DN.
At The Equatorial AN - В Экваториальной AN.
At The Nearest AN/DN With The Target - В ближайшей AN/DN с целью.
At The Next AN With The Target - При следующем AN с целью.
At The Next DN With The Target - На следующем DN с целью.
At Closest Approach To Target - При ближайшем подходе к цели.
![]()
![]() Change Both Pe And Ap - Изменить апоцентр и перицентр.
Change Both Pe And Ap - Изменить апоцентр и перицентр.
![]() Change Inclination - Изменить наклон орбиты.
Change Inclination - Изменить наклон орбиты.
![]() Change Longitude of Ascending Node - Изменить долготу восходящего узла.
Change Longitude of Ascending Node - Изменить долготу восходящего узла.
![]() Change Periapsis - Изменить перицентр.
Change Periapsis - Изменить перицентр.
![]() Change Semi-major Axis - Изменить большую полуось.
Change Semi-major Axis - Изменить большую полуось.
![]() Change Surface Longitude of Apsis - Изменить долготу апоцентра.
Change Surface Longitude of Apsis - Изменить долготу апоцентра.
![]() Circularize - Циркуляризировать орбиту. Сделать орбиту круглой.
Circularize - Циркуляризировать орбиту. Сделать орбиту круглой.
![]() Fine Tune Closest Approach to Target - Настройка ближайшего подхода к цели.
Fine Tune Closest Approach to Target - Настройка ближайшего подхода к цели.
![]() Intercept Target At Chosen Time - Перехват цели в выбранное время.
Intercept Target At Chosen Time - Перехват цели в выбранное время.
![]() Match Planes With Target - Сопоставить плоскость орбиты с целью.
Match Planes With Target - Сопоставить плоскость орбиты с целью.
Используйте если ваша орбита и орбита цели находится в разных плоскостях.
![]() Match Velocities With Target - Сопоставить скорость с целью.
Match Velocities With Target - Сопоставить скорость с целью.
Используйте чтобы замедлить движение относительно цели при ближайшем подходе.
![]() Resonant Orbit - Изменение соотношения новой орбиты к старой.
Resonant Orbit - Изменение соотношения новой орбиты к старой.
Параметр New Orbital Period Ratio изменяет соотношение новой и текущей орбиты.
![]() Return From a Moon - Возвращение с Муны.
Return From a Moon - Возвращение с Муны.
С помощью этого модуля можно вернуться не только с Муны на Кербин, но и с орбиты любого другого естественного спутника на орбиту планеты, вокруг которой он вращается.
![]() Transfer to Another Planet - Трансфер на другую планету.
Transfer to Another Planet - Трансфер на другую планету.
Можно выбрать At The Next Transfer Window, старт при следующем ближайшем окне.
Или As Soon As Possible, старт так скоро, как только это возможно.
Advanced Transfer To Another Planet - Режим работы Porkсhop Selection
Этот модуль минимизирует затраты ΔV на межпланетные перелеты, вычисляя такое время отправления, когда планеты будут на самом оптимальном расстоянии друг от друга.Как правило, такое временное окно для маневра открывается довольно редко, раз в год, а то и еще реже. Для активации модуля необходимо выбрать в качестве цели планету, на которую вы собрались лететь. Градиентная карта показывает расход ΔV в определенных временных промежутках. Синим цветом отображаются промежутки времени в которые вы потратите наименьшее количество топлива на маневр. Чтобы приблизить карту, нужно зажать на ней левую кнопку мышки и выбрать область увеличения. Под картой, в левом углу, отображается значение ΔV, когда вы перемещаете курсор по карте, это значение меняется. В правом углу кнопка Reset, она отвечает за сброс масштаба карты. Напротив надписи Select есть две кнопки Lowest ΔV и ASAP. Первая, Lowest ΔV автоматически выбирает окно старта с самыми наименьшими затратами ΔV, а ASAP ближайшее для вылета окно. Топлива вы потратите больше, чем в первом случае, зато вылетите раньше. Ниже, Departure In и Transit Duration, это время ожидания маневра и время в пути. Время изменится, если вы будете водить мышкой по карте или выберите Lowest ΔV или ASAP. Клик по карте, а затем по кнопке Create Node, создаст узел манёвра.
Porkchop Selection - Переключение режима работы. Include Capture Burn - Показывать затраты ΔV на торможение у планеты назначения.
Lowest ΔV - Самый низкий ΔV.
ASAP - Как можно скорее.
Departure In - Маневр через.
Transit Duration - Длительность перелета.
Create Node - Создать узел маневра.
Create And Execute - Создать и выполнить.
Remove ALL Nodes - Удалить узлы маневра.
Auto-Warp - Автоматическое ускорение времени.
Tolerance - Допустимое отклонение.
Lead Time - Время выполнения.
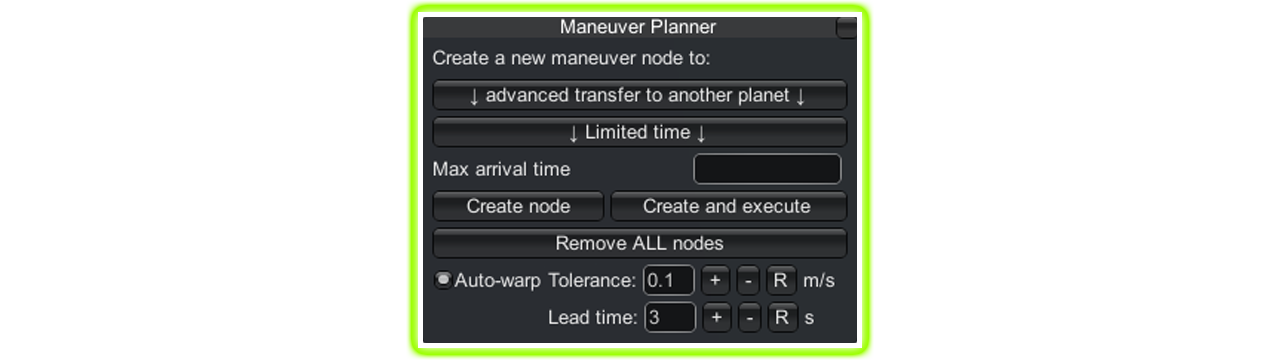
Advanced Transfer To Another Planet - Режим работы Limited Time
В режиме Limited Time если нажать на Create Node, в окне Max Arrival Time появится оптимальное время вылета. Вылет можно отложить на любое нужное вам время.Допустим 25y 100d 04h 25m 40s (25 лет, 100 дней, 4 часа, 25 минут и 40 секунд).
Maneuver Planner подберет оптимальное окно с наименьшими затратами ΔV к этой дате.
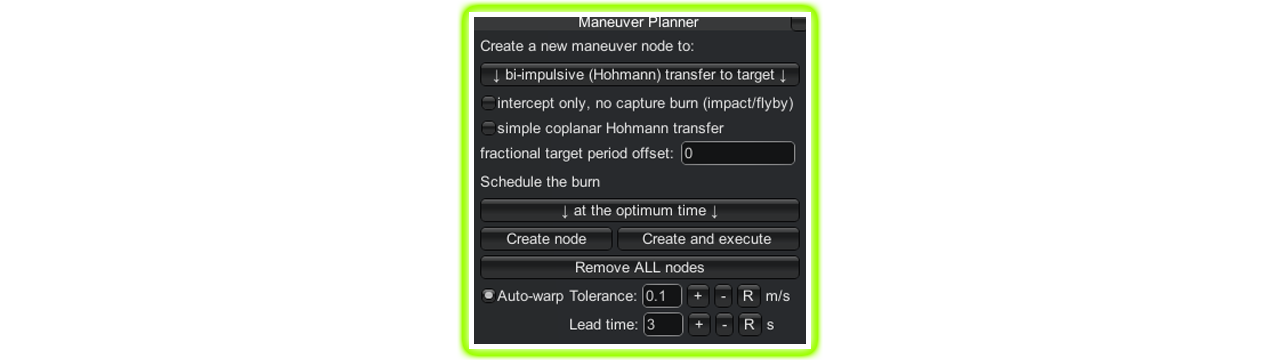
Max Arrival Time - Максимальное время прибытия.Bimpulsive (Hohmann) Transfer To Target - Переход на орбиту цели и саму цель
Используется для сближения с судами или лунами находящимися в одной сфере влияния.Intercept Only, No Capture Burn (Impact/Flyby) - Только перехват цели.Simple Coplanar Hohmann Transfer - Простой компланарный переход.
Fractional Target Period Offset - Смещение узла маневра.
At The Optimum Time - В оптимальное время.
At The Next Periapsis - На следующем перицентре.
At The Next Apoapsis - На следующем апоцентре.
After a Fixed Time - После фиксированного времени.
At An Altitude - На высоте.
At The Equatorial DN - В экваториальной DN.
At The Equatorial AN - В Экваториальной AN.
At The Nearest AN/DN With The Target - В ближайшей AN/DN с целью.
At The Next AN With The Target - При следующем AN с целью.
At The Next DN With The Target - На следующем DN с целью.
At Closest Approach To Target - При ближайшем подходе к цели.
Второстепенные модули
Change Apoapsis - Изменение апоцентра.Используйте если ваша орбита и орбита цели находится в разных плоскостях.
Используйте чтобы замедлить движение относительно цели при ближайшем подходе.
Параметр New Orbital Period Ratio изменяет соотношение новой и текущей орбиты.
С помощью этого модуля можно вернуться не только с Муны на Кербин, но и с орбиты любого другого естественного спутника на орбиту планеты, вокруг которой он вращается.
Можно выбрать At The Next Transfer Window, старт при следующем ближайшем окне.
Или As Soon As Possible, старт так скоро, как только это возможно.
RCS Balancer - Модуль не работает
Модуль RCS Balancer более не функционирует.
Статья пользователя Delliardo, от 2014 года. Ссылка[github.com].
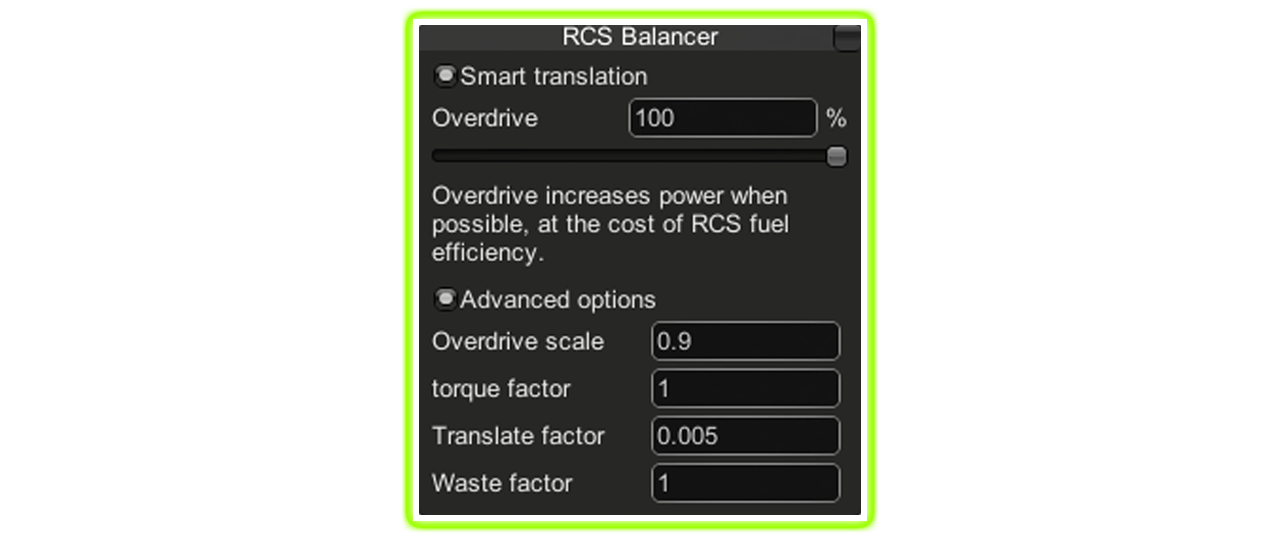
Статья пользователя Delliardo, от 2014 года. Ссылка[github.com].
Rendezvous Autopilot - Простое свидание
Простое свидание с целью находящейся на орбите. Для активации Rendezvous Autopilot выберите цель. Важно чтобы вы и выбранная вами цель находились в одной и той же сфере влияния планеты или спутника. Автопилот не будет работать если вы допустим, находитесь на орбите Кербина, а цель выбрали на орбите Муны. 📺
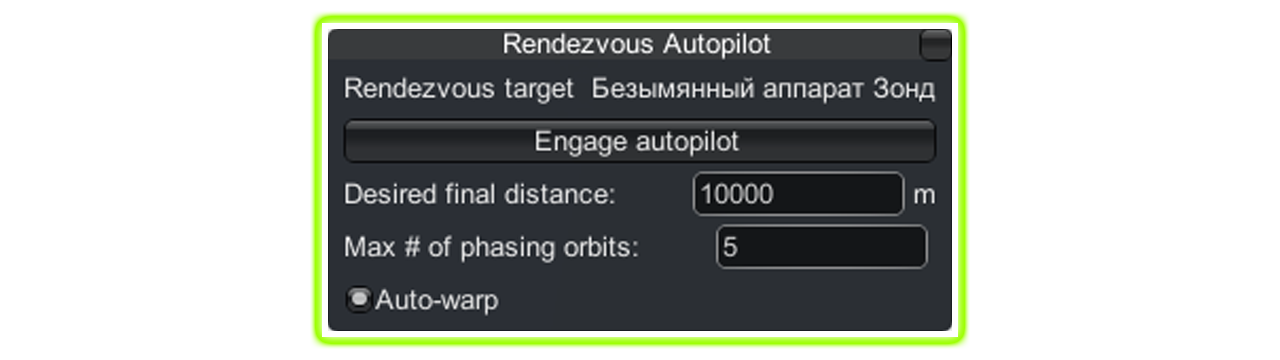
Rendezvous Target - Выбранная цель.
Engage Autopilot - Включить автопилот.
Desired Final Distance - Желаемое расстояние при сближении с целью.
Max # Of Phasing Orbits - Максимальное количество фазированных орбит.
Auto-Warp - Автоматическое ускорение времени.
![]() Что такое максимальное количество фазированных орбит?
Что такое максимальное количество фазированных орбит?
Rendezvous Target - Выбранная цель.
Engage Autopilot - Включить автопилот.
Desired Final Distance - Желаемое расстояние при сближении с целью.
Max # Of Phasing Orbits - Максимальное количество фазированных орбит.
Auto-Warp - Автоматическое ускорение времени.
Это созданные автопилотом промежуточные орбиты для достижения цели.
Rendezvous Planner - Свидание с целью
Rendezvous Planner имеет расширенный функционал и гибкие настройки корректировки орбиты для последующего сближения с целью. В отличии от Rendezvous Autopilot, здесь содержится больше параметров и возможностей. Для активации параметров необходимо выбрать цель. 📺
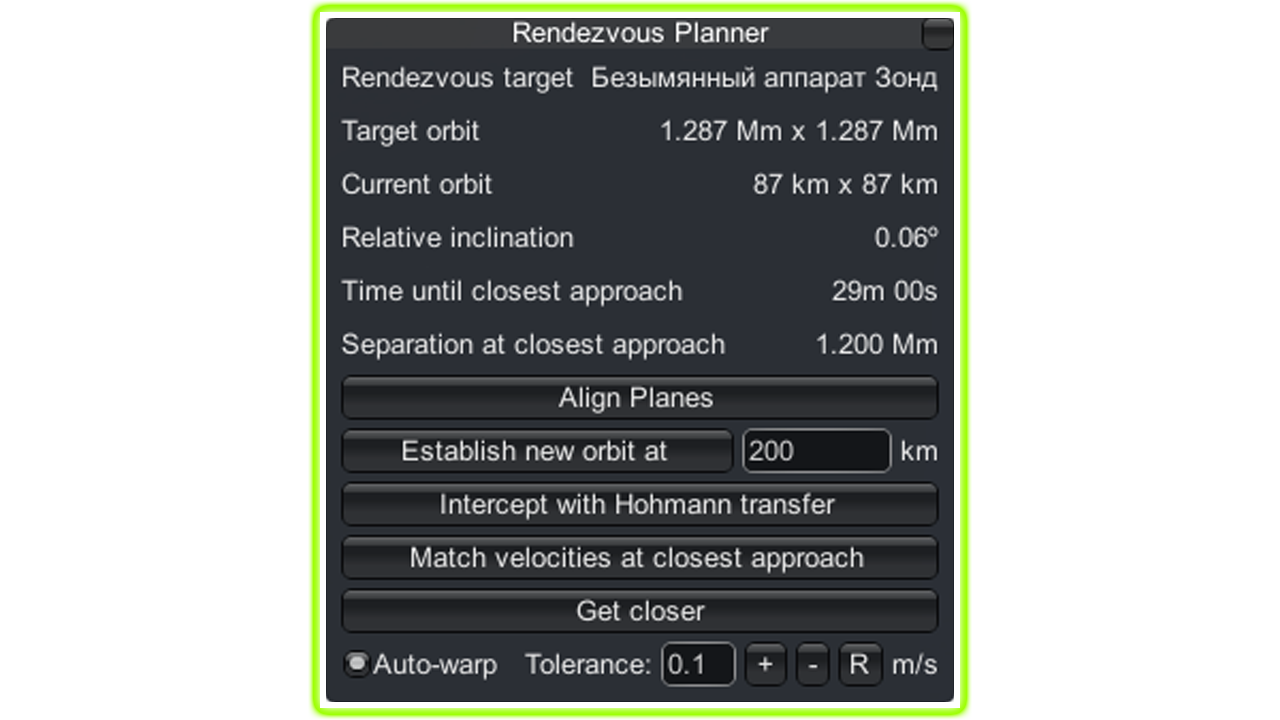
Rendezvous Target - Выбранная цель.
Target Orbit - Целевая орбита.
Current Orbit - Текущая орбита.
Relative Inclination - Относительный наклон.
Time Until Closest Approach - Время до ближайшего сближения.
Separation At Closest Approach - Разделение при ближайшем подходе.
Align Planes - Выровнять наклонение орбиты.
Establish New Orbit At - Установить новую орбиту в.
Intercept With Hohmann Transfer - Перехват цели в точке сближения.
Match Velocities At Closest Approach - Уровнять скорость при ближайшем подходе.
Get Closer - Ближайшая точка сближения.
Execute Next Node - Выполнить следующий узел.
Auto-Warp - Автоматическое ускорение времени.
Tolerance - Допустимое отклонение.
Rendezvous Target - Выбранная цель.
Target Orbit - Целевая орбита.
Current Orbit - Текущая орбита.
Relative Inclination - Относительный наклон.
Time Until Closest Approach - Время до ближайшего сближения.
Separation At Closest Approach - Разделение при ближайшем подходе.
Align Planes - Выровнять наклонение орбиты.
Establish New Orbit At - Установить новую орбиту в.
Intercept With Hohmann Transfer - Перехват цели в точке сближения.
Match Velocities At Closest Approach - Уровнять скорость при ближайшем подходе.
Get Closer - Ближайшая точка сближения.
Execute Next Node - Выполнить следующий узел.
Auto-Warp - Автоматическое ускорение времени.
Tolerance - Допустимое отклонение.
Rover Autopilot - Ровер автопилот
Rover Autopilot управляет наземными транспортными средствами. С его помощью можно задавать курс и скорость, прокладывать путевые точки по которым будет двигаться ровер. 📺
![]()
Heading Control - Контроль направление.
Heading - Направление.
Heading Error - Отклонение от направления.
Speed Control - Контроль скорости.
Speed - Скорость.
Speed Error - Отклонение от скорости.
Stability Control - Контроль стабильности.
Brake on Pilot Eject - Тормоз при выбросе пилота.
Brake on Energy Depletion - Тормоз при малом остатке электроэнергии.
Warp until Day if Depleted - Перемотка времени на день если батареи сели.
Target Speed - Целевая скорость.
Waypoint Index - Номер маршрутной точки в которой сейчас ровер / общее число точек.
Waypoints - Меню настройки путевых точек.
![]() Эти параметры появляются только с выбранной целью.
Эти параметры появляются только с выбранной целью.
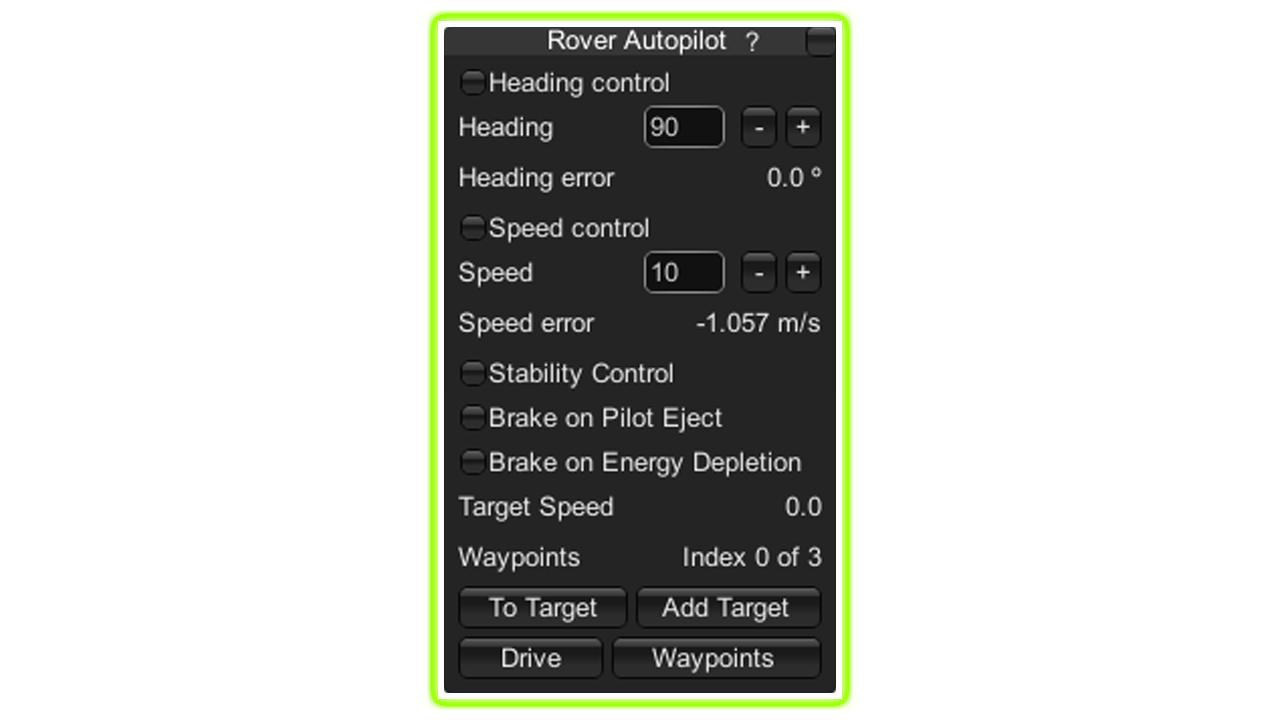
To Target - Двигаться к цели.
Add Target - Добавить цель.
Этот параметр появляются после установки хотя бы одной путевой точки.
![]() Drive - Начать движение по путевым точкам.
Drive - Начать движение по путевым точкам.
![]()
Созданные таким образом маршруты можно сохранять и использовать в дальнейшем.

Add Waypoint - Добавить путевую точку.
Remove - Удалить путевую точку.
Up - Поднять путевую точку на одну строчку вверх.
Down - Опустить путевую точку на одну строчку вниз.
Routes - Маршруты. Сюда можно сохранить маршрут, или отсюда его загрузить.
Settings - Настройки.
![]() Как добавить путевую точку?
Как добавить путевую точку?

Heading Control - Контроль направление.
Heading - Направление.
Heading Error - Отклонение от направления.
Speed Control - Контроль скорости.
Speed - Скорость.
Speed Error - Отклонение от скорости.
Stability Control - Контроль стабильности.
Brake on Pilot Eject - Тормоз при выбросе пилота.
Brake on Energy Depletion - Тормоз при малом остатке электроэнергии.
Warp until Day if Depleted - Перемотка времени на день если батареи сели.
Target Speed - Целевая скорость.
Waypoint Index - Номер маршрутной точки в которой сейчас ровер / общее число точек.
Waypoints - Меню настройки путевых точек.
To Target - Двигаться к цели.
Add Target - Добавить цель.
Этот параметр появляются после установки хотя бы одной путевой точки.
Rover Waypoints - Путевые точки
В этом окне можно создавать путевые точки по которым будет двигаться ровер.Созданные таким образом маршруты можно сохранять и использовать в дальнейшем.
Add Waypoint - Добавить путевую точку.
Remove - Удалить путевую точку.
Up - Поднять путевую точку на одну строчку вверх.
Down - Опустить путевую точку на одну строчку вниз.
Routes - Маршруты. Сюда можно сохранить маршрут, или отсюда его загрузить.
Settings - Настройки.
Чтобы добавить путевую точку нужно нажать Add Waypoint, а затем нажать левой кнопкой мыши на то место, куда должен поехать ровер. Выбрать место можно как и в режиме карты так и в обычном режиме!
Rover Waypoints - Settings
В Rover Autopilot есть вкладка Waypoint Help. Там очень много информации, но она просто не помещается в один раздел Rover Autopilot. Поэтому следующие два раздела только для Waypoint Help.
Rover Autopilot - Waypoint Help №1
Первый раздел с описанием функций и работы параметров в Rover Autopilot.
![]()
![]()
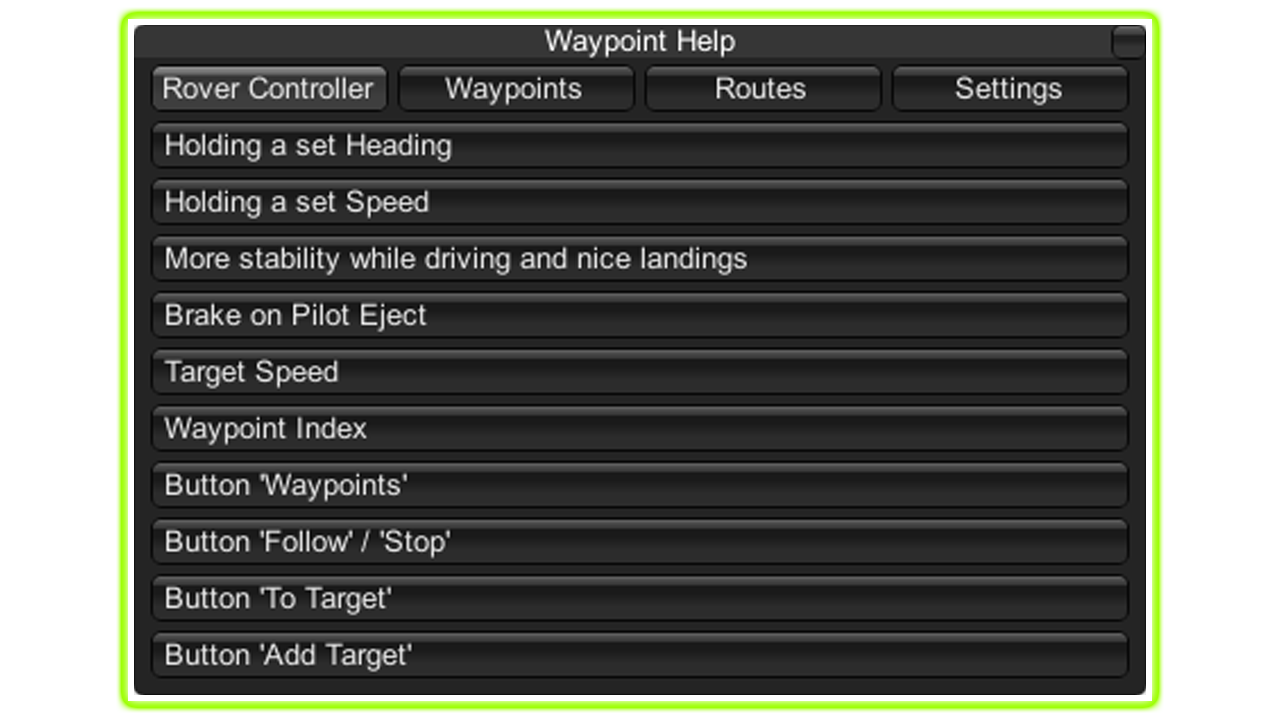
🔎 Holding a set Heading - Удержание курса.
Чтобы удерживать определенный курс, просто поставьте галочку напротив поля Heading Control и автопилот будет пытаться двигаться по введенному курсу. Heading Control также необходимо включить когда предполагается что автопилот движется к путевой точке.
Heading Error просто показывает ошибку между текущим и целевым курсом.
![]() 🔎 Holding a set Speed - Удержание заданной скорости.
🔎 Holding a set Speed - Удержание заданной скорости.
Чтобы удерживать определенную скорость, просто поставьте галочку напротив Speed Control и автопилот будет двигаться с введенной скоростью. Speed Control также необходимо включить, когда автопилот должен двигаться по путевым точкам.
Speed Error просто показывает ошибку между текущей скоростью и целевой скоростью.
![]() 🔎 More Stability While Driving And Nice Landings - Больше стабильности и хорошая посадка.
🔎 More Stability While Driving And Nice Landings - Больше стабильности и хорошая посадка.
Если вы включите Stability Control, то автопилот будет использовать гиродины, чтобы удерживать ровер в ровном положении. Это означает, что если вы совершите прыжок, автопилот попытается выровнять ровер наилучшим образом, чтобы приземлиться максимально ровно. Имейте в виду, что это не делает ваш ровер неразрушимым. Stability Control также снижает тормозную силу чтобы уменьшить вероятность переворота из за слишком большой мощности торможения. Регулируйте этот параметр перейдя в Settings и Traction And Breaking.
Эта настройка также сохраняется для каждого судна.
![]() 🔎 Brake on Pilot Eject - Тормозить если пилот покинет аппарат.
🔎 Brake on Pilot Eject - Тормозить если пилот покинет аппарат.
Если этот параметр включен, ровер остановится если пилот покинет место.
Работает только на пилотируемых роверах.
![]() 🔎 Target Speed - Целевая скорость.
🔎 Target Speed - Целевая скорость.
Скорость, которую пытается достичь автопилот.
![]() 🔎 Waypoint Index - Индекс путевой точки.
🔎 Waypoint Index - Индекс путевой точки.
Список активных путевых точек и номер точки к которой в данный момент ведет автопилот.
![]() 🔎 Button "Waypoints" - Кнопка настройки путевых точек.
🔎 Button "Waypoints" - Кнопка настройки путевых точек.
Открывает список путевых точек для настройки маршрута.
![]() 🔎 Button "Follow / Stop" - Кнопка "Движение / Остановка".
🔎 Button "Follow / Stop" - Кнопка "Движение / Остановка".
Этот параметр позволяет автопилоту двигаться по заданному маршруту, начиная с первой точки маршрута. Параметр отображается только когда установлена хотя бы одна путевая точка. Кнопка Alt + клик по путевой точке меняет порядок движения автопилота.
Если единственной путевой точкой окажется цель, автопилот будет следовать за ней, а не только один раз приблизится к ней. Если автопилот уже активен, кнопка Follow переключится на кнопку Stop, которая, очевидно, остановит его при нажатии.
![]() 🔎 Button "To Target" - Кнопка "Двигаться к цели".
🔎 Button "To Target" - Кнопка "Двигаться к цели".
Немедленно очистить список путевых точек и добавляет цель как единственную путевую точку и запустить автопилот. Параметр виден только с выбранной целью.
Alt + клик по путевой точке, установит автопилот в "Loop Mode", что заставит его продолжать следовать за целью, останавливаясь, рядом с ней, вместо того, чтобы затем выключиться.
![]() 🔎 Button "Add Target" - Кнопка "Добавить цель".
🔎 Button "Add Target" - Кнопка "Добавить цель".
Добавляет выбранную цель в качестве путевой точки либо в конец маршрута, либо до выбранной путевой точки. Параметр виден только с выбранной целью.
![]()
🔎Adding Waypoints - Добавление путевых точек.
Добавляет новую путевую точку к маршруту в конце или перед выбранной в данный момент путевой точкой. Просто щелкните по местности или сделайте это в режиме карты. С зажатым Alt нажмите на путевую точку что бы перестроить маршрут, а для облегчения построения цепочки маршрута, удерживайте Alt в то же время нажимая правой кнопкой мыши на ландшафт или цель в режиме карты. Так вы сможете добавить больше точек без необходимости повторного нажатия кнопки Add Waypoint.
![]() 🔎Removing Waypoints - Удаление путевых точек.
🔎Removing Waypoints - Удаление путевых точек.
Удаляет текущую выбранную путевую точку, а с зажатым Alt, удалить все путевые точки.
![]() 🔎Reordering Waypoints - Изменение порядка точек.
🔎Reordering Waypoints - Изменение порядка точек.
Up и Down переместить выбранную путевую точку на одну строчку вверх или вниз по списку, а с зажатым Alt переместить ее в самый вверх или низ соответственно.
![]() 🔎Waypoint Radius - Радиус путевой точки.
🔎Waypoint Radius - Радиус путевой точки.
Радиус определяет расстояние до центра путевой точки, после которого путевая точка будет считаться достигнутой. Радиус 5 метров (по умолчанию) просто означает, что когда вы находитесь на расстоянии 5 метров от путевой точки, автопилот перейдет к следующей или выключится, если она была последней. Кнопка "A" за текстовым полем, установить введенный радиус для всех путевых точек.
![]() 🔎Speed Limits - Ограничения скорости.
🔎Speed Limits - Ограничения скорости.
Два текстовых поля скорости представляют минимальную и максимальную скорость для путевой точки. Максимальная скорость - это скорость, которую пытается достичь автопилот, чтобы добраться до путевой точки. Ранее минимальная скорость использовалась для установки скорости, с которой автопилот будет проходить через путевую точку, но теперь она была переработана. Я понятия не имею, что она делает в настоящее время. Будет лучше, просто оставить значение по умолчанию. Кнопка "A" задает соответствующую скорость для всех путевых точек.
![]() 🔎QuickSaving at a Waypoint - Быстрое сохранение в путевой точке.
🔎QuickSaving at a Waypoint - Быстрое сохранение в путевой точке.
Нажатие на кнопку "QS" включить "QuickSave" для этой путевой точки. Это заставит автопилот остановиться и попытаться выполнить быстрое сохранение в этой точке, а затем продолжить движение. У путевой точки "QuickSave" есть желтый текст вместо белого. Кликнув по "QuickSave" с зажатым Alt, переключит "QuickSave" для всех путевых точек, включая выбранную.
![]() 🔎Changing The Current Target Waypoint - Изменение текущей целевой путевой точки.
🔎Changing The Current Target Waypoint - Изменение текущей целевой путевой точки.
Нажатие на путевую точку помечает ее как текущую целевую путевую точку. Активная путевая точка имеет зеленый тонированный фон.
Waypoint Help - Помощник по путевым точкам
Выбрав Help вы попадете в окно Waypoint Help. Здесь есть четыре вкладки Rover Controller, Waypoints, Routes и Settings. В них содержится большое количество информации, описание работы функций и прочие инструкции. - Я перевел для вас все вкладки.Rover Controller - Управление ровером
🔎 Holding a set Heading - Удержание курса.
Чтобы удерживать определенный курс, просто поставьте галочку напротив поля Heading Control и автопилот будет пытаться двигаться по введенному курсу. Heading Control также необходимо включить когда предполагается что автопилот движется к путевой точке.
Heading Error просто показывает ошибку между текущим и целевым курсом.
Чтобы удерживать определенную скорость, просто поставьте галочку напротив Speed Control и автопилот будет двигаться с введенной скоростью. Speed Control также необходимо включить, когда автопилот должен двигаться по путевым точкам.
Speed Error просто показывает ошибку между текущей скоростью и целевой скоростью.
Если вы включите Stability Control, то автопилот будет использовать гиродины, чтобы удерживать ровер в ровном положении. Это означает, что если вы совершите прыжок, автопилот попытается выровнять ровер наилучшим образом, чтобы приземлиться максимально ровно. Имейте в виду, что это не делает ваш ровер неразрушимым. Stability Control также снижает тормозную силу чтобы уменьшить вероятность переворота из за слишком большой мощности торможения. Регулируйте этот параметр перейдя в Settings и Traction And Breaking.
Эта настройка также сохраняется для каждого судна.
Если этот параметр включен, ровер остановится если пилот покинет место.
Работает только на пилотируемых роверах.
Скорость, которую пытается достичь автопилот.
Список активных путевых точек и номер точки к которой в данный момент ведет автопилот.
Открывает список путевых точек для настройки маршрута.
Этот параметр позволяет автопилоту двигаться по заданному маршруту, начиная с первой точки маршрута. Параметр отображается только когда установлена хотя бы одна путевая точка. Кнопка Alt + клик по путевой точке меняет порядок движения автопилота.
Если единственной путевой точкой окажется цель, автопилот будет следовать за ней, а не только один раз приблизится к ней. Если автопилот уже активен, кнопка Follow переключится на кнопку Stop, которая, очевидно, остановит его при нажатии.
Немедленно очистить список путевых точек и добавляет цель как единственную путевую точку и запустить автопилот. Параметр виден только с выбранной целью.
Alt + клик по путевой точке, установит автопилот в "Loop Mode", что заставит его продолжать следовать за целью, останавливаясь, рядом с ней, вместо того, чтобы затем выключиться.
Добавляет выбранную цель в качестве путевой точки либо в конец маршрута, либо до выбранной путевой точки. Параметр виден только с выбранной целью.
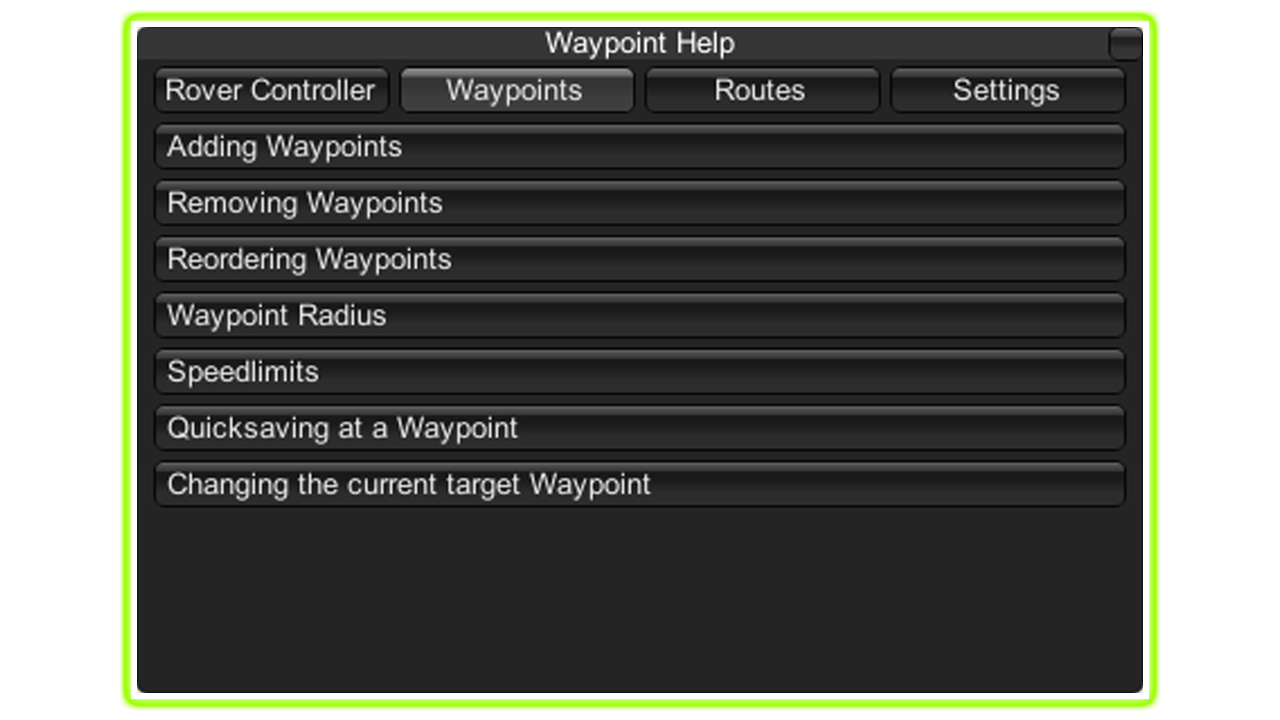
Waypoints - Путевые точки
🔎Adding Waypoints - Добавление путевых точек.
Добавляет новую путевую точку к маршруту в конце или перед выбранной в данный момент путевой точкой. Просто щелкните по местности или сделайте это в режиме карты. С зажатым Alt нажмите на путевую точку что бы перестроить маршрут, а для облегчения построения цепочки маршрута, удерживайте Alt в то же время нажимая правой кнопкой мыши на ландшафт или цель в режиме карты. Так вы сможете добавить больше точек без необходимости повторного нажатия кнопки Add Waypoint.
Удаляет текущую выбранную путевую точку, а с зажатым Alt, удалить все путевые точки.
Up и Down переместить выбранную путевую точку на одну строчку вверх или вниз по списку, а с зажатым Alt переместить ее в самый вверх или низ соответственно.
Радиус определяет расстояние до центра путевой точки, после которого путевая точка будет считаться достигнутой. Радиус 5 метров (по умолчанию) просто означает, что когда вы находитесь на расстоянии 5 метров от путевой точки, автопилот перейдет к следующей или выключится, если она была последней. Кнопка "A" за текстовым полем, установить введенный радиус для всех путевых точек.
Два текстовых поля скорости представляют минимальную и максимальную скорость для путевой точки. Максимальная скорость - это скорость, которую пытается достичь автопилот, чтобы добраться до путевой точки. Ранее минимальная скорость использовалась для установки скорости, с которой автопилот будет проходить через путевую точку, но теперь она была переработана. Я понятия не имею, что она делает в настоящее время. Будет лучше, просто оставить значение по умолчанию. Кнопка "A" задает соответствующую скорость для всех путевых точек.
Нажатие на кнопку "QS" включить "QuickSave" для этой путевой точки. Это заставит автопилот остановиться и попытаться выполнить быстрое сохранение в этой точке, а затем продолжить движение. У путевой точки "QuickSave" есть желтый текст вместо белого. Кликнув по "QuickSave" с зажатым Alt, переключит "QuickSave" для всех путевых точек, включая выбранную.
Нажатие на путевую точку помечает ее как текущую целевую путевую точку. Активная путевая точка имеет зеленый тонированный фон.
Rover Autopilot - Waypoint Help №2
Второй раздел с описанием функций и работы параметров в Rover Autopilot.
![]()
🔎Routes Help - Справка по маршрутам.
Пустое текстовое поле предназначено для сохранения маршрутов, введите имя перед тем, как нажать "Save". Чтобы загрузить маршрут, просто выберите его в списке и нажмите "Load".
Чтобы удалить маршрут, просто выберите его, и кнопка "Delete" появится справа от него.
![]()
🔎Heading/Speed PID - PID регулятор курса / скорости.
Эти параметры управляют поведением PID курса / скорости. Изменения сохраняются глобально, поэтому без навыков не вносите изменения. Или, по крайней мере, записывайте числа по умолчанию, чтобы потом восстановить их, если вы запутались.
![]() 🔎Safe Tun Speed - Безопасная скорость.
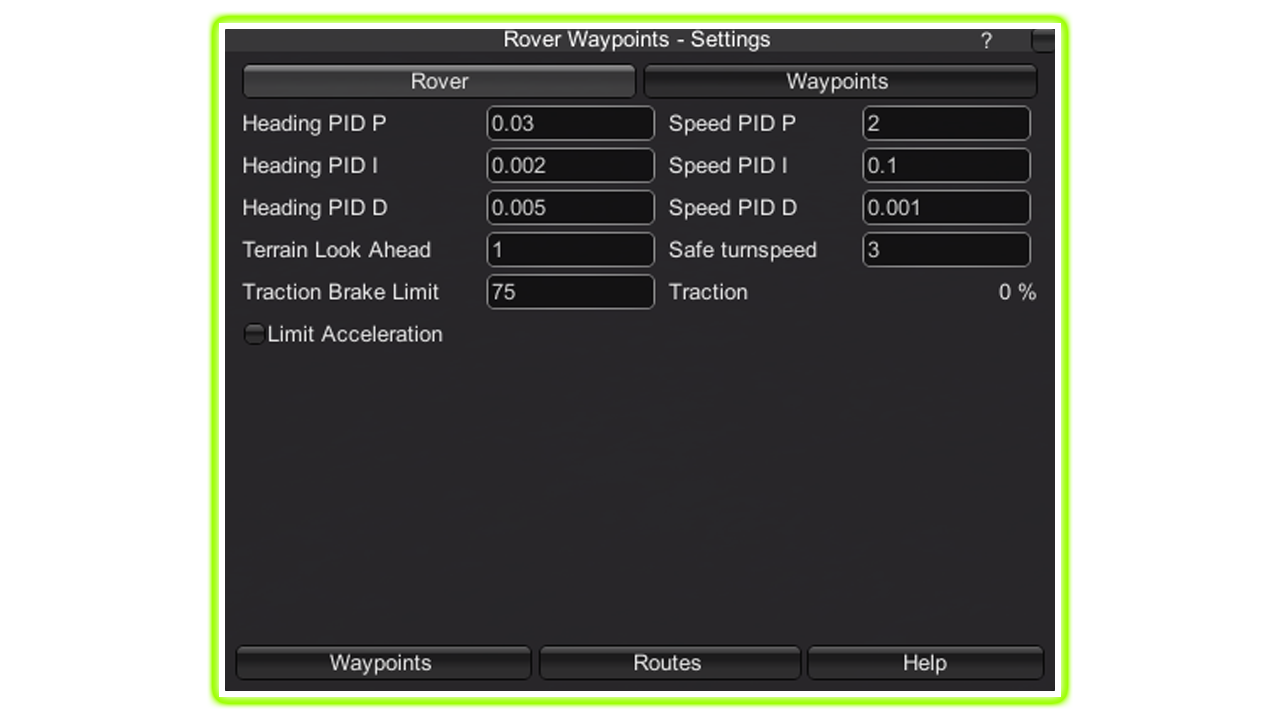
🔎Safe Tun Speed - Безопасная скорость.
Safe Tun Speed сообщает автопилоту, с какой скоростью ровер может проходить поворот без опрокидывания. Принимая во внимание то, каким может быть рельеф местности и другие факторы, вы можете просто оставить значение по умолчанию, но если вы нетерпеливы или просто хотите экспериментировать, не стесняйтесь проверять. Сохраняется для каждого типа судна, одноименные суда будут иметь общую настройку.
![]() 🔎Traction And Braking - Тяга и торможение.
🔎Traction And Braking - Тяга и торможение.
Тормозная тяга отображается в процентах, сколько колес имеют контакт с землей. Предел тягового тормоза определяет, какое тяговое усилие требуется, для того, чтобы автопилот включал тормоза (если включен Stability Control), даже если вы удерживаете тормоз. Это означает, что с настройками по умолчанию 75% тормозной тяги будет использоваться, только если по крайней мере три колеса имеют контакт с землей. Предел тягового тормоза сохраняется для каждого типа судна.
![]() 🔎Changing The Route Height In Mapview - Изменение высоты маршрута в режиме карты.
🔎Changing The Route Height In Mapview - Изменение высоты маршрута в режиме карты.
Эти значения определяют смещения для высоты маршрута в режиме карты. Учитывая, как странно это настроено, может быть, что они слишком высокие или слишком низкие, поэтому я добавил их для облегчения настройки. Я думаю, что настройки сохраняются глобально.
Routes - Маршруты
🔎Routes Help - Справка по маршрутам.
Пустое текстовое поле предназначено для сохранения маршрутов, введите имя перед тем, как нажать "Save". Чтобы загрузить маршрут, просто выберите его в списке и нажмите "Load".
Чтобы удалить маршрут, просто выберите его, и кнопка "Delete" появится справа от него.
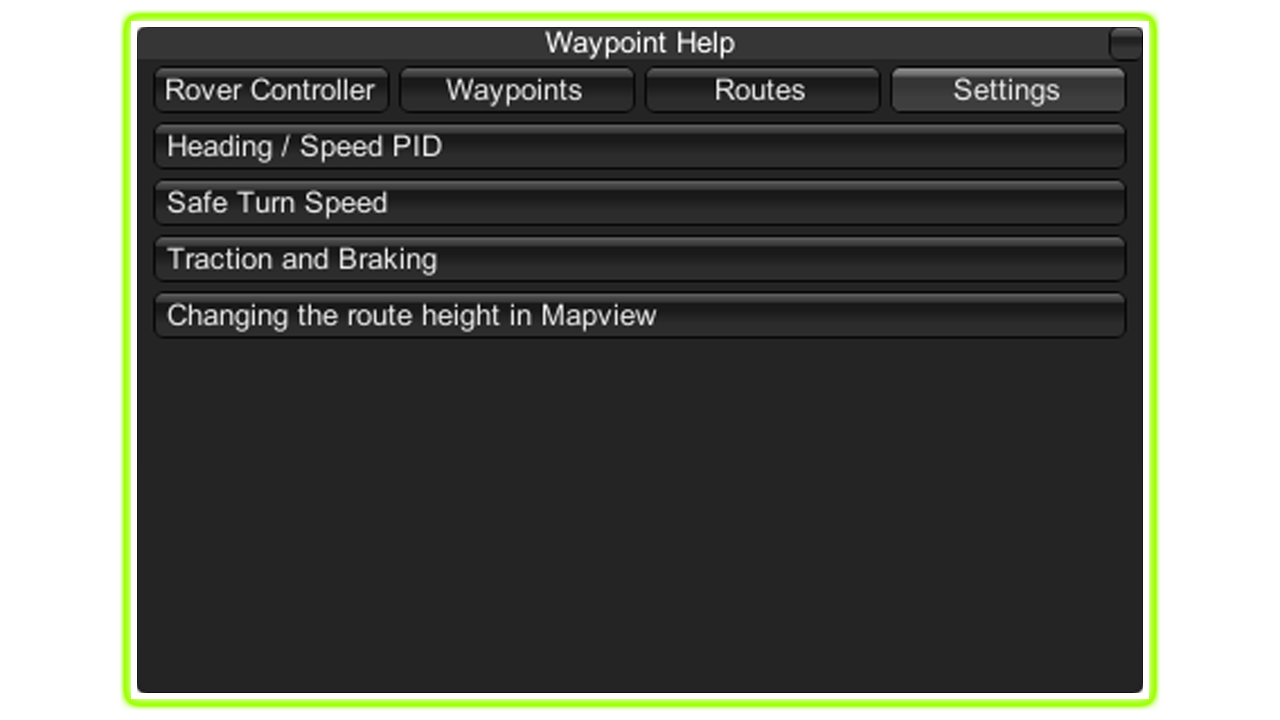
Settings - Настройки
🔎Heading/Speed PID - PID регулятор курса / скорости.
Эти параметры управляют поведением PID курса / скорости. Изменения сохраняются глобально, поэтому без навыков не вносите изменения. Или, по крайней мере, записывайте числа по умолчанию, чтобы потом восстановить их, если вы запутались.
Safe Tun Speed сообщает автопилоту, с какой скоростью ровер может проходить поворот без опрокидывания. Принимая во внимание то, каким может быть рельеф местности и другие факторы, вы можете просто оставить значение по умолчанию, но если вы нетерпеливы или просто хотите экспериментировать, не стесняйтесь проверять. Сохраняется для каждого типа судна, одноименные суда будут иметь общую настройку.
Тормозная тяга отображается в процентах, сколько колес имеют контакт с землей. Предел тягового тормоза определяет, какое тяговое усилие требуется, для того, чтобы автопилот включал тормоза (если включен Stability Control), даже если вы удерживаете тормоз. Это означает, что с настройками по умолчанию 75% тормозной тяги будет использоваться, только если по крайней мере три колеса имеют контакт с землей. Предел тягового тормоза сохраняется для каждого типа судна.
Эти значения определяют смещения для высоты маршрута в режиме карты. Учитывая, как странно это настроено, может быть, что они слишком высокие или слишком низкие, поэтому я добавил их для облегчения настройки. Я думаю, что настройки сохраняются глобально.
Scripting Module - Сценарии
Scripting Module может полностью автоматизировать процессы и последовательность запуска модулей. Созданные сценарии можно сохранить и использовать в дальнейшем. 📺
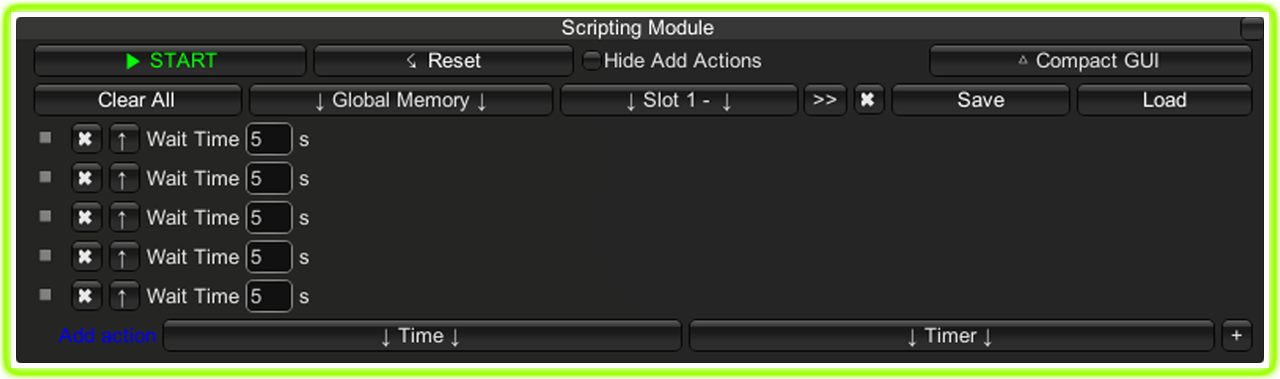
Reset - Перезапустить сценарий.
Hide Add Action - Показать, скрыть раздел Add Action.
Compact GUI - Компактный размер окна.
![]()
Global Memory - Глобальная память.
Vessel Memory - Память судна.
Slot - Слот.
Стрелочка - Добавить название слоту.
Крестик - Очистить слот.
Save - Сохранить изменения.
Load - Загрузить слот.
![]()
Scripting Module также может запускать модули автопилота, стыковки или посадки.
Первая строчка - Общее управление сценариями
Start - Запустить сценарий.Reset - Перезапустить сценарий.
Hide Add Action - Показать, скрыть раздел Add Action.
Compact GUI - Компактный размер окна.
Вторая строчка - Общее управление сценариями
Clear All - Очистить все.Global Memory - Глобальная память.
Vessel Memory - Память судна.
Slot - Слот.
Стрелочка - Добавить название слоту.
Крестик - Очистить слот.
Save - Сохранить изменения.
Load - Загрузить слот.
Add Action - Добавить действие
Всего 12 групп в них 33 действия, с их помощью можно выбрать стыковочный порт, переключится на другую ракету, отстыковать ступень или запустить двигатель.Scripting Module также может запускать модули автопилота, стыковки или посадки.
Scripting Module - Добавить действие
Time - Время
🔴 Timer - Таймер. Установить таймер, по его истечению запустится следующее действие.🔴 Pause - Пауза. Поставить выполнение скрипта на паузу. Кнопка GO, продолжить.
🔴 Wait For - Ожидание до момента.
- Altitude - Высота.
- Speed - Скорость.
- Distance To Target - Дистанция до цели.
- Target Apoapsis - Цель апоцентр.
- Target Periapsis - Цель перицентр.
- Target Time To Closest Approach - Целевое время до ближайшего подхода.
- Target Distance To Closest Approach - Целевое расстояние до ближайшего подхода.
- Target Relative Velocity - Целевая относительная скорость.
- Target Inclination - Наклон цели.
- Target Orbit Period - Целевой орбитальный период.
- Target Orbit Speed - Целевая скорость орбиты.
- Target Time To Ap - Целевое время для апоцентра.
- Target Time To Pe - Целевое время для перицентра.
- Target LAN - ???
- Target AoP - ???
- Target Eccentricity - Целевой эксцентриситет.
- Target SMA - ???
- Periapsis In Target SOI - ???
- Phase Angle To Target - Фазовый угол к цели.
- Target Planet Phase Angle - Фазовый угол целевой планеты.
- Relative Inclination - Относительный наклон.
- Time to AN - ???
- Time to DN - ???
- Time To aquatonal AN - ???
- Time To aquatonal DN - ???
- Circular Orbit Speed - Круговая скорость орбиты.
- Apospeis - Апоцентр.
- Periapsis - Перицентр.
- Параметры, влияющие на условие выполнения действия.
- Smaller Than - Меньше чем.
- Equal To - Равно.
- Greater Than - Больше чем.
- Between - Между.
- Periapsis - Перицентр.
- Apoapsis - Апоцентр.
- Maneuver Node - Узел маневра.
- Sol Transition - Начало входа в зону притяжения планеты или спутника.
- Time - Время.
- Phase Angle - Фазовый угол.
- Suicide Burn - Suicide Burn Distance.
- Atmospheric Entry - Вход в атмосферу.
- Lead Time - За какое время до цели остановить ускорение.
Docking - Стыковка
🔴 Decouple - Отделить стыковочный порт.Выбрать стыковочный порт на вашем аппарате. Значок Глаза, подсвечивает порт.
🔴 Dock Shield - Открыть или закрыть щит экранированного стыковочного порта.
🔴 Target Dock - Цель стыковочный порт.
Первый стыковочный порт будет целью, второй порт выбирается как "Управлять отсюда".
Target- Цель
🔴 Target Dock - Цель стыковочный порт.Первый стыковочный порт будет целью, второй порт выбирается как "Управлять отсюда".
🔴 Target Body - Установить цель, космическое тело.
- Sun - Солнце.
- Kerbin - Кербин.
- Mun - Муна.
- Minmus - Минмус.
- Moho - Мохо.
- Eve - Ева.
- Duna - Дюна.
- Ike - Айк.
- Jool - Джул.
- Laythe - Лейт.
- Vall - Валл.
- Bop - Боп.
- Tylo - Тайло.
- Gilly - Гилли.
- Pol - Пол.
- Dres - Дрес.
- Ealoo - Илу.
Control - Контроль
🔴 Control From - Управление от выбранного командного модуля.🔴 RCS - Reaction Control System.
- RCS - Включить, выключить РСУ.
- RCS Throttle When Engines Are Offline - Использовать двигатели РСУ для движения.
- Use RCS For Rotation - Использовать двигатели РСУ для вращения.
- Zero Rvel - Ваша скорость относительно цели будет нулевой.
🔴 Switch Vessel - Переключить управление судном.
Crew - Экипаж
Выбрать кербонавта и пересадить его, из одного модуля в другой.Включенный значок Глаза, подсвечивает выбранные модули.
Trajectory - Траектория
🔴 Maneuver - Планировщик маневров.- Назначение и перевод всех параметров смотрите в разделе Maneuver Planner.
- Next Node - Выполнить только следующий узел маневра.
- All Nodes - Выполнить все узлы.
- Auto-Warp - Автоматическое ускорение времени.
Staging/Engines - Ступени / Двигатели
🔴 Staging - Активировать ступень.- Активировать следующую ступень или выбрать номер ступени.
 🔴 Activate Engine - Активировать двигатель.
🔴 Activate Engine - Активировать двигатель.- Выбрать двигатель, который нужно включить. Значок глаза, подсвечивает двигатель.
Settings - Настройки
🔴 Tolerance - Допустимое отклонение.🔴 Lead Time - Время выполнения.
Modules - Модули
🔴 Smart A.S.S. - Умная стабилизация🔴 Ascent Autopilot - Автопилот.
🔴 Docking Autopilot - Стыковка.
🔴 Landing - Посадка.
🔴 Rendezvous - Простое свидание.
🔴 Rendezvous Autopilot - Свидание с целью.
Описание и назначение модулей, смотрите в разделах.
Перед добавлением модуля, его нужно настроить, нажав на значок Глаза.
Save/Load/Actions - Сохранить / Загрузить / Действия
🔴 QuickSave - Быстрое сохранение игры.🔴 Load Script - Загрузить сохраненный скрипт из слота.
🔴 Action Group - Группа действий.
- Abord - Аварийная группа действий.
- Brakes - Тормоза.
- Custom01 - От 01, до 09. Группа действий, назначается в ангаре.
- Gear - Посадочные стойки, шасси.
- Light - Свет.
- None - Нет.
- RCS - РСУ.
- SAS - Система автоматической стабилизации.
- Stage - Ступень.
PROGRAM Logic - Программа логики
Repeat - Повторить.If - Если.
While - В то время как.
Parallel - Параллельно.
Wait For - Ожидание.
Plugins - Плагины
Scripting Module - Пример сценариев
Сценарий выполняет следующие действия. Взлет ракеты ракеты носителя, выход на орбиту в 75 километров, отстыковка спутника, запуск двигателя спутника, сход с орбиты ракеты носителя, посадка рядом с центром управления полетами, быстрое сохранение. 📺
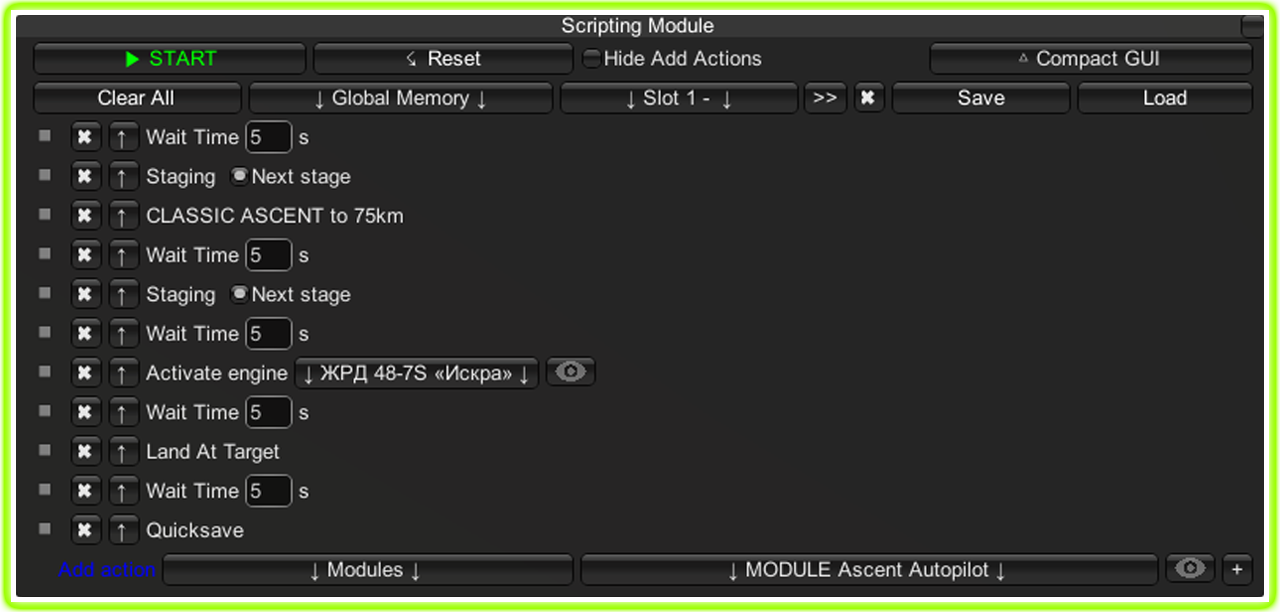
1 - Ожидание 5 секунд.
2 - Запуск следующей ступени. (Следующая ступень, двигатель ракеты носителя).
3 - Запуск модуля Ascent Guidance, выход на орбиту в 75 километров.
4 - Ожидание 5 секунд.
5 - Запуск следующей ступени. (Отстыковка спутника от ракеты носителя).
6 - Ожидание 5 секунд.
7 - Запуск двигателя. (Запуск двигателя отстыкованного спутника).
8 - Ожидание 5 секунд.
9 - Запуск модуля Landing Guidance, автоматическая посадка.
10 - Ожидание 5 секунд.
11 - Быстрое сохранение.
![]() Между этими действиями я добавил ожидание в 5 секунд, чтобы было понятнее.
Между этими действиями я добавил ожидание в 5 секунд, чтобы было понятнее.
Номер 3, Ascent Guidance не начнет работу, пока двигатели ракеты не будут запущены, именно поэтому, сначала номер 2, запускает ступень с двигателями и пусковой мачтой.
В таких случаях можно использовать параллельные действия (Parallel), в них можно назначать два действия сразу, но я отказался от них, для наглядности и упрощения сценария.
1 - Ожидание 5 секунд.
2 - Запуск следующей ступени. (Следующая ступень, двигатель ракеты носителя).
3 - Запуск модуля Ascent Guidance, выход на орбиту в 75 километров.
4 - Ожидание 5 секунд.
5 - Запуск следующей ступени. (Отстыковка спутника от ракеты носителя).
6 - Ожидание 5 секунд.
7 - Запуск двигателя. (Запуск двигателя отстыкованного спутника).
8 - Ожидание 5 секунд.
9 - Запуск модуля Landing Guidance, автоматическая посадка.
10 - Ожидание 5 секунд.
11 - Быстрое сохранение.
Номер 3, Ascent Guidance не начнет работу, пока двигатели ракеты не будут запущены, именно поэтому, сначала номер 2, запускает ступень с двигателями и пусковой мачтой.
В таких случаях можно использовать параллельные действия (Parallel), в них можно назначать два действия сразу, но я отказался от них, для наглядности и упрощения сценария.
Settings - Общие настройки MechJeb
В окне Settings содержаться общие настройки MechJeb. 📺
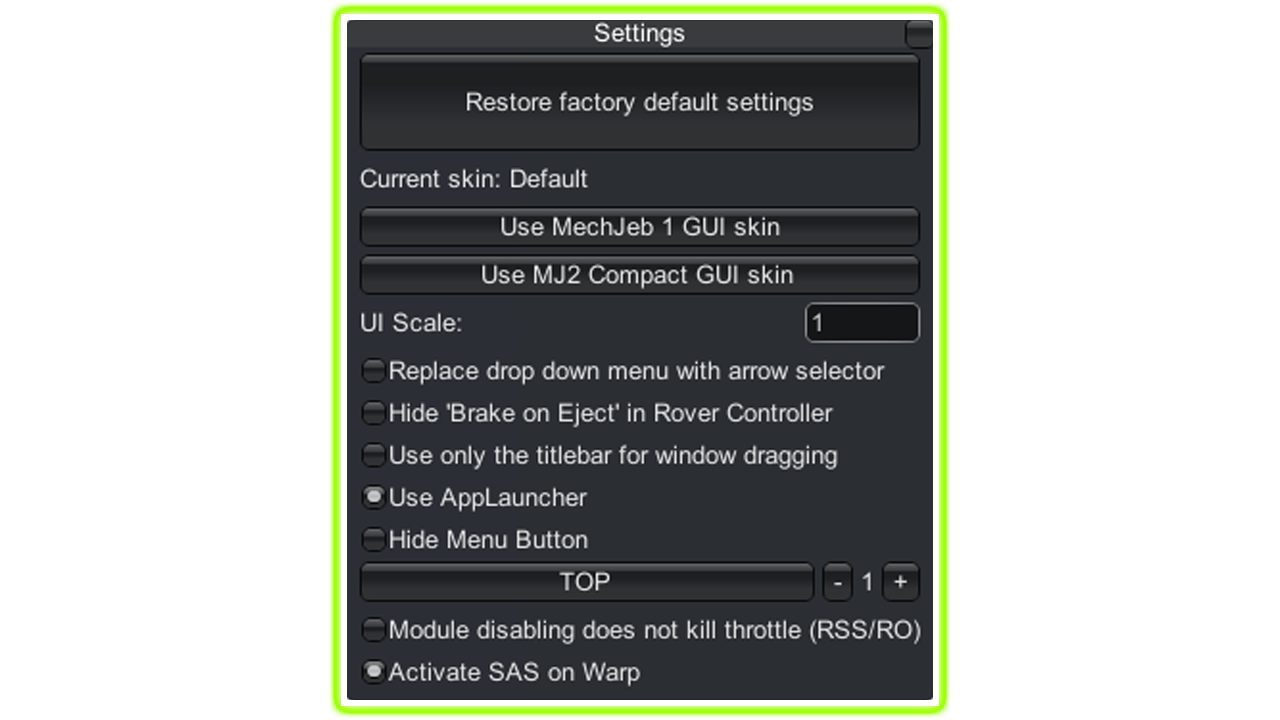 Restore Factory Default Settings - Сбросить все настройки MechJeb.
Restore Factory Default Settings - Сбросить все настройки MechJeb.
Current Skin - Изменение общего вида окон MechJeb.
"Ul Scale" - Изменение масштаба окон MechJeb.
Replace Drop Down Menu With Arrow Selector - Заменить всплывающие окна, стрелками.
Hide 'Brake On Eject' In Rover Controller - Показывать параметр Brake on Eject.
Этот параметр включает тормоза на транспорте если кербонавт покинул кресло пилота.
![]() Use Only The Titlebar For Window Dragging - Перемещать окно за шапку.
Use Only The Titlebar For Window Dragging - Перемещать окно за шапку.
Использовать только заголовок окна для его перемещения по экрану.
![]() Use AppLauncher - Использовать всплывающие окно MechJeb.
Use AppLauncher - Использовать всплывающие окно MechJeb.
Hide Menu Button - Скрыть кнопку MechJeb.
![]() Module Disabling Does Not Kill Throttle (RSS/RO) - При потере связи не сбрасывать тягу.
Module Disabling Does Not Kill Throttle (RSS/RO) - При потере связи не сбрасывать тягу.
При потере связи с модулем, дроссельная заслонка не будет перекрыта.
![]() Activate SAS on Warp - Использовать САС при ускорении времени.
Activate SAS on Warp - Использовать САС при ускорении времени.
Restore Factory Default Settings - Сбросить все настройки MechJeb.Current Skin - Изменение общего вида окон MechJeb.
"Ul Scale" - Изменение масштаба окон MechJeb.
Replace Drop Down Menu With Arrow Selector - Заменить всплывающие окна, стрелками.
Hide 'Brake On Eject' In Rover Controller - Показывать параметр Brake on Eject.
Этот параметр включает тормоза на транспорте если кербонавт покинул кресло пилота.
Использовать только заголовок окна для его перемещения по экрану.
Hide Menu Button - Скрыть кнопку MechJeb.
При потере связи с модулем, дроссельная заслонка не будет перекрыта.
Smart A.S.S. - Умная стабилизация
Smart A.S.S. стабилизирует корабль, также, как делает это бортовая система автоматической стабилизации, но с более расширенными возможностями. Возможности Smart A.S.S. будут полезны для модулей у которых нет системы системы автоматической стабилизации. 📺
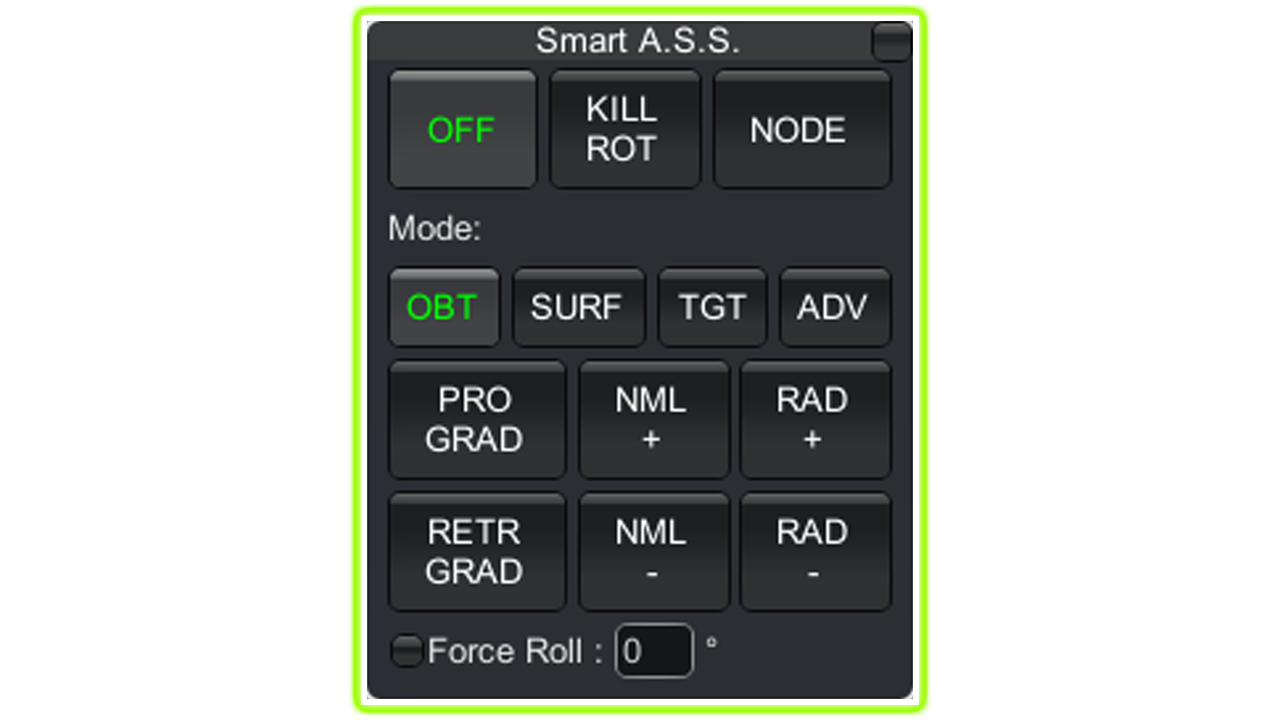 Off - Выключение стабилизации.
Off - Выключение стабилизации.
Kill Rot - Избавиться от (любого) вращения. Значок тильда ~ в стоковом САС.
Node - Цель на узел маневра.
Mode - Режим работы стабилизации.
Всего режима, четыре - OBT, SURF, TGT, ADV.
Рассмотрим каждый по порядку.
![]()
RETR GRAD - Против движения.
NML + Нормаль.
NML - Антинормаль
RAD + Радиально наружу.
RAD - Радиально внутрь.
Force Roll - Удерживать крен.
![]()
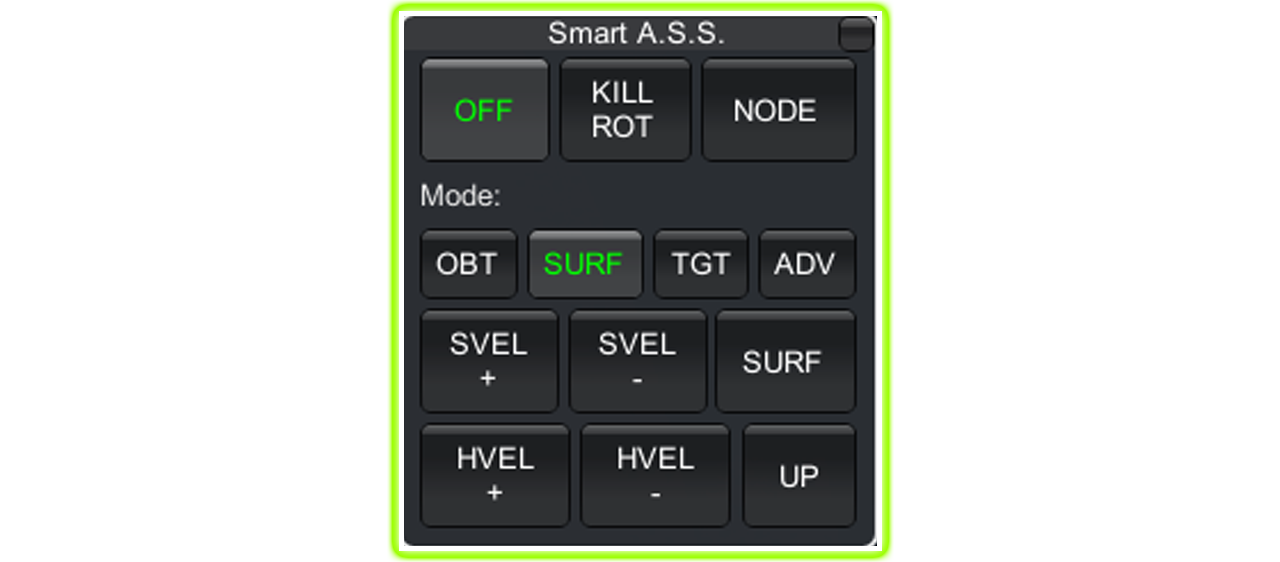 SVEL + Surface velocity - По вектору скорости относительно поверхности. Угол атаки = 0°
SVEL + Surface velocity - По вектору скорости относительно поверхности. Угол атаки = 0°
SVEL - Surface velocity - Против вектора скорости относительно поверхности. Угол атаки = 180°
HVEL + Horizontal velocity - По проекции вектора SVEL на горизонтальную ось. Тангаж = 0°
HVEL - Horizontal velocity - Против проекции вектора SVEL на горизонтальную ось. Тангаж = 180°
SURF - Задать произвольный угол либо кнопками с шагом в 1°, либо введя с клавиатуры.
UP - Тангаж = 90° / Направление, перпендикулярное горизонту / Строго вверх.
![]()
 Для активации параметров нужно выбрать цель.
Для активации параметров нужно выбрать цель.
TGT + Направление на цель.
TGT - Направление против цели.
RVEL + Relative velocity - по вектору скорости относительно цели.
RVEL - Relative velocity - против вектора скорости относительно цели.
PAR + Направление параллельно цели положительно.
PAR - Направление параллельно цели отрицательно.
Force Roll - Крен относительно цели.
![]()

Reference - Цель на которую нужно ориентироваться.
INERTIAL - Инерциа́льная.
ORBIT - Орбита.
ORBIT HORIZONTAL - Орбита горизонтальная.
SURFACE NORTH - Поверхность север.
SURFACE VELOCITY - По движению.
TARGET - Цель.
RELATIVE VELOCITY - Относительная скорость.
TARGET ORIENTATION - Ориентация по цели.
MANEUVER NODE - Узел маневра.
SUN - Солнце.
SURFACE HORIZONTAL - Поверхность горизонтальная.
![]() Direction - Направление относительно выбранной цели.
Direction - Направление относительно выбранной цели.
FORWARD - Вперед.
BACK - Назад.
UP - Вверх.
DOWN - Вниз.
RIGHT - Вправо.
LEFT - Влево.
![]() Force Roll - Крен относительно цели.
Force Roll - Крен относительно цели.
EXECUTE - Выполнить настройки.
![]() Как это применить?
Как это применить?
Off - Выключение стабилизации.Kill Rot - Избавиться от (любого) вращения. Значок тильда ~ в стоковом САС.
Node - Цель на узел маневра.
Mode - Режим работы стабилизации.
Всего режима, четыре - OBT, SURF, TGT, ADV.
Рассмотрим каждый по порядку.
OBT - Орбита
PRO GRAD - По движению.RETR GRAD - Против движения.
NML + Нормаль.
NML - Антинормаль
RAD + Радиально наружу.
RAD - Радиально внутрь.
Force Roll - Удерживать крен.
SURF - Поверхность
SVEL + Surface velocity - По вектору скорости относительно поверхности. Угол атаки = 0°SVEL - Surface velocity - Против вектора скорости относительно поверхности. Угол атаки = 180°
HVEL + Horizontal velocity - По проекции вектора SVEL на горизонтальную ось. Тангаж = 0°
HVEL - Horizontal velocity - Против проекции вектора SVEL на горизонтальную ось. Тангаж = 180°
SURF - Задать произвольный угол либо кнопками с шагом в 1°, либо введя с клавиатуры.
UP - Тангаж = 90° / Направление, перпендикулярное горизонту / Строго вверх.
TGT - Цель
Для активации параметров нужно выбрать цель.TGT + Направление на цель.
TGT - Направление против цели.
RVEL + Relative velocity - по вектору скорости относительно цели.
RVEL - Relative velocity - против вектора скорости относительно цели.
PAR + Направление параллельно цели положительно.
PAR - Направление параллельно цели отрицательно.
Force Roll - Крен относительно цели.
ADV - Настраиваемая стабилизация
Настраиваемая стабилизация для удержания корабля относительно выбранной цели.Reference - Цель на которую нужно ориентироваться.
INERTIAL - Инерциа́льная.
ORBIT - Орбита.
ORBIT HORIZONTAL - Орбита горизонтальная.
SURFACE NORTH - Поверхность север.
SURFACE VELOCITY - По движению.
TARGET - Цель.
RELATIVE VELOCITY - Относительная скорость.
TARGET ORIENTATION - Ориентация по цели.
MANEUVER NODE - Узел маневра.
SUN - Солнце.
SURFACE HORIZONTAL - Поверхность горизонтальная.
FORWARD - Вперед.
BACK - Назад.
UP - Вверх.
DOWN - Вниз.
RIGHT - Вправо.
LEFT - Влево.
EXECUTE - Выполнить настройки.
Во вкладке Reference нужно выбрать цель, пускай это будет солнце.
Вкладка Direction отвечает за направление корабля, относительно выбранной цели.
Таким образом, можно сделать, чтобы солнечные панели были всегда повернуты к солнцу.
Smart RCS - Контроль двигателей РСУ
Smart RCS это небольшой помощник для контроля двигателей РСУ. 📺
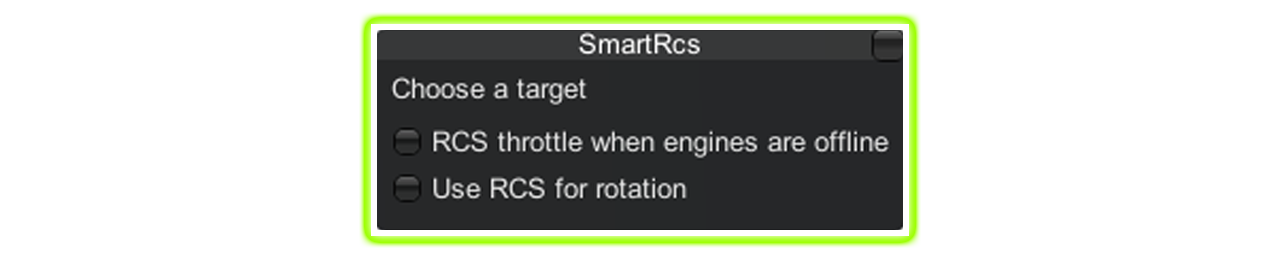 RCS Throttle When Engines Are Offline - Использовать двигатели РСУ для движения.
RCS Throttle When Engines Are Offline - Использовать двигатели РСУ для движения.
Работает только когда основные двигатели ракеты выключены или в баках закончилось топливо.
Use RCS For Rotation - Использовать двигатели РСУ для вращения.
![]()
Следующие параметры станут доступны только после выбора цели.
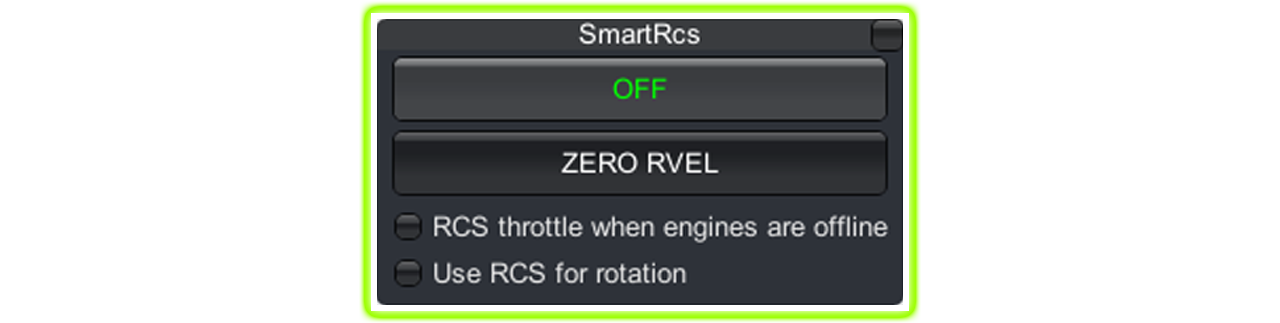 OFF - Выключить нулевое отклонение.
OFF - Выключить нулевое отклонение.
ZERO RVEL - Ваша скорость относительно цели будет нулевой.
Аппарат, как бы прилипнет к цели на том расстоянии, на котором вы активировали эту функцию.
RCS Throttle When Engines Are Offline - Использовать двигатели РСУ для движения.Работает только когда основные двигатели ракеты выключены или в баках закончилось топливо.
Use RCS For Rotation - Использовать двигатели РСУ для вращения.
Следующие параметры станут доступны только после выбора цели.
OFF - Выключить нулевое отклонение.ZERO RVEL - Ваша скорость относительно цели будет нулевой.
Аппарат, как бы прилипнет к цели на том расстоянии, на котором вы активировали эту функцию.
Translatron - Контроль тяги двигателя
Модуль Translatron управляет дроссельной заслонкой и осуществляет полный контроль скорости спуска или подъема аппаратов с реактивными двигателями, а так же позволяет зависать над одним местом. Используется только в вертикальном положении. 📺
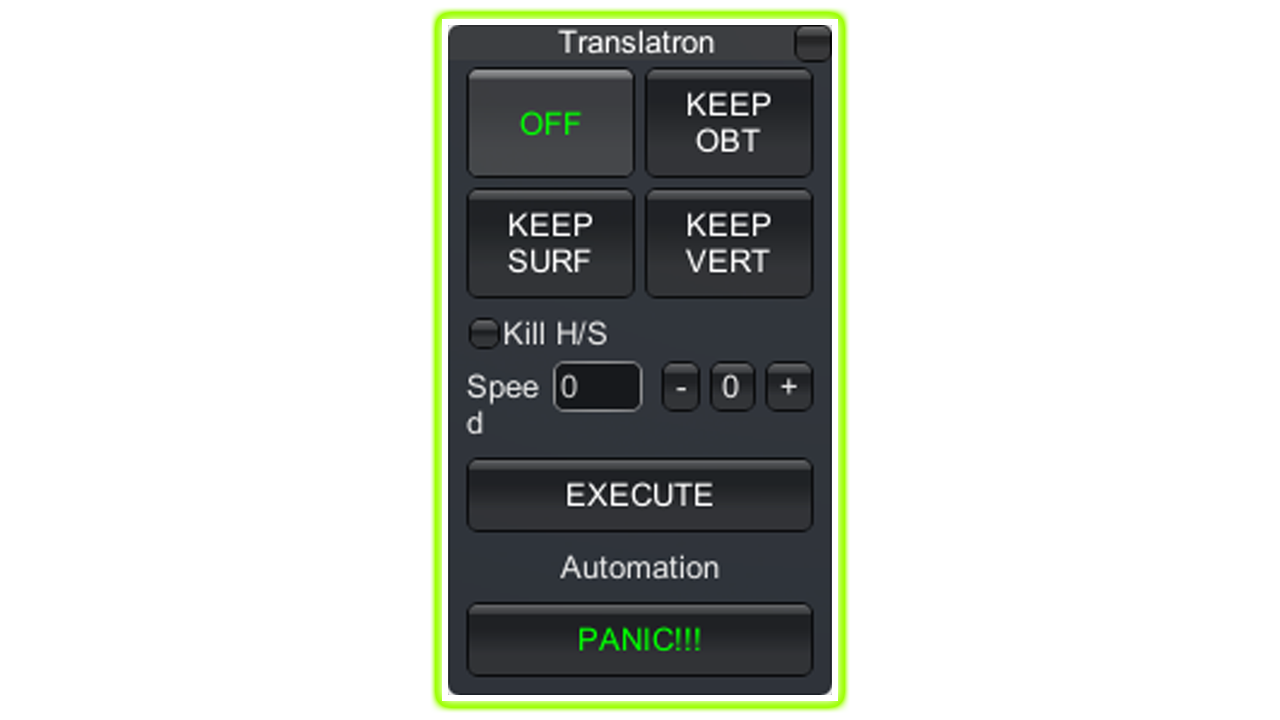
OFF - Выключить Translatron.
KEEP OBT - Держать орбитальную скорость.
KEEP VERT - Сохранить вертикальную скорость, подъема или спуска. 📺
KEEP SURF - Сохранить поверхностную скорость.
Kill H/S - Контроль устойчивости, зависнуть на месте. 📺
Speed - Скорость набора или сброса высоты.
EXECUTE - Выполнить выбранное действие.
PANIC!!! - Прервать текущий процесс, активация 100% тяги двигателей.
Кнопка "Паника", активируется если что то пошло не по плану. Включается полная тяга двигателей и стабилизация ориентации аппарата, после активируется режим посадки, выпускаются посадочные стойки, выполняется посадка.
OFF - Выключить Translatron.
KEEP OBT - Держать орбитальную скорость.
KEEP VERT - Сохранить вертикальную скорость, подъема или спуска. 📺
KEEP SURF - Сохранить поверхностную скорость.
Kill H/S - Контроль устойчивости, зависнуть на месте. 📺
Speed - Скорость набора или сброса высоты.
EXECUTE - Выполнить выбранное действие.
PANIC!!! - Прервать текущий процесс, активация 100% тяги двигателей.
Кнопка "Паника", активируется если что то пошло не по плану. Включается полная тяга двигателей и стабилизация ориентации аппарата, после активируется режим посадки, выпускаются посадочные стойки, выполняется посадка.
Utilities - Вспомогательные параметры
В Utilities можно развернуть или свернуть все солнечные панели и антенны на станции. Можно чтобы солнечные панели и антенны сами разворачивались по достижению безвоздушного пространства. Можно включить автоматический сброс пустой ступени ракеты и запуск двигателя следующий, при этом контроль над ракетой, будет по прежнему у вас. 📺
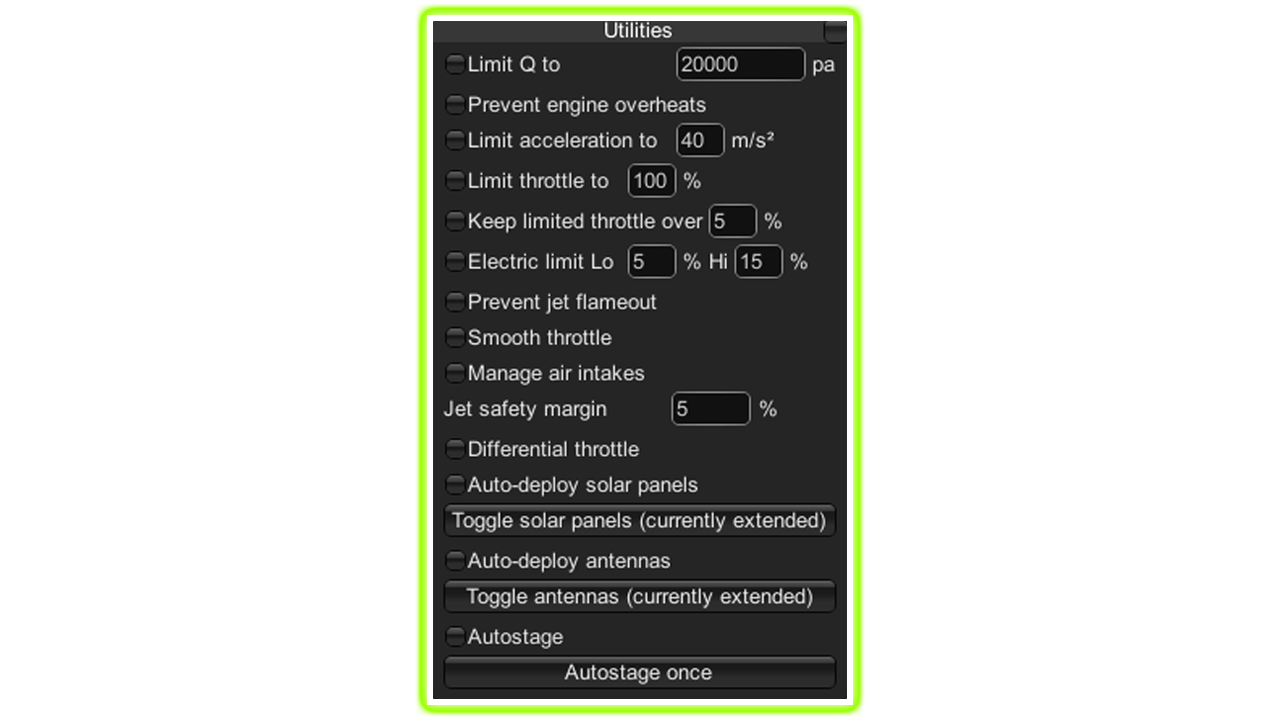
Utilities Limit Q - Параметр ограничивает скорость если превышено указанное давление.
Prevent Engine Overheats - Предотвращать перегрев двигателей.
Limit Acceleration To - Ограничить ускорение до.
Limit Throttle To - Ограничить тягу до.
Keep Limited Throttle Over - Ограничение дросселя на.
Electric Limit Lo - Электрический лимит.
Prevent Jet Flameout - Предотвратить реактивное воспламенение.
Smooth Throttle - Плавный дроссель тяги.
Manage Air Intakes - Управление воздухозаборниками.
Jet Safety Margin - Запас безопасности струи.
Differential Tnrottle - Дифференциальный двигатель.
Auto-Deploy Solar Panels - Автоматическое развертывание солнечных батарей.
Toggle Solar Panels (Currently Retracted) - Переключить солнечные панели.
Auto-Deploy Antennas - Автоматическое развертывание антенн.
Toggle Antennas (Currently Retracted) - Переключить антенны
AutoStage - Автоматический сброс пустой ступени.
AutoStage Once - Разовый сброс пустой ступени.
Utilities Limit Q - Параметр ограничивает скорость если превышено указанное давление.
Prevent Engine Overheats - Предотвращать перегрев двигателей.
Limit Acceleration To - Ограничить ускорение до.
Limit Throttle To - Ограничить тягу до.
Keep Limited Throttle Over - Ограничение дросселя на.
Electric Limit Lo - Электрический лимит.
Prevent Jet Flameout - Предотвратить реактивное воспламенение.
Smooth Throttle - Плавный дроссель тяги.
Manage Air Intakes - Управление воздухозаборниками.
Jet Safety Margin - Запас безопасности струи.
Differential Tnrottle - Дифференциальный двигатель.
Auto-Deploy Solar Panels - Автоматическое развертывание солнечных батарей.
Toggle Solar Panels (Currently Retracted) - Переключить солнечные панели.
Auto-Deploy Antennas - Автоматическое развертывание антенн.
Toggle Antennas (Currently Retracted) - Переключить антенны
AutoStage - Автоматический сброс пустой ступени.
AutoStage Once - Разовый сброс пустой ступени.
Warp Helper - Умное ускорение времени
Warp Helper это помощник ускорения времени. Можно быстро и с огромной точностью перематывать время до любого события, точки или маневра. 📺
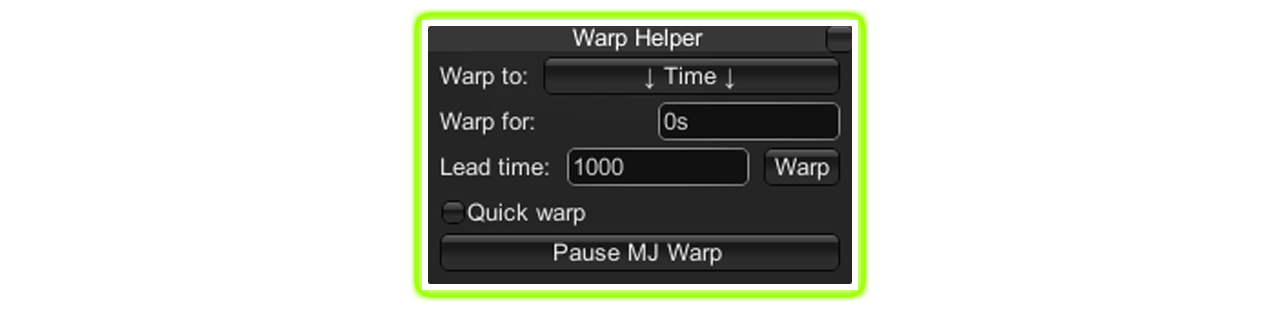
Warp To - Ускорение до.
Здесь выбирается до какого определенного момента, или периода, будет ускоренно время.
Periapsis - Перицентр.
Apoapsis - Апоцентр.
Maneuver Node - Маневренный узел.
Sol Transition - Начало входа в зону притяжения планеты или спутника.
Time - Время.
Phase Angle - Фазовый угол.
Suicide Burn - Двигатель включается на 100% мощности, удерживая при этом вектор тяги строго против вектора скорости относительно поверхности. При правильном расчёте момента включения скорость гасится ровно в момент касания поверхности.
Atmospheric Entry - Вход в атмосферу.
![]() Lead Time - Время выполнения.
Lead Time - Время выполнения.
Warp - Активация ускорения.
Quick Warp - Запустить быстрое ускорение.
Pause MJ Warp - Пауза.
Warp To - Ускорение до.
Здесь выбирается до какого определенного момента, или периода, будет ускоренно время.
Periapsis - Перицентр.
Apoapsis - Апоцентр.
Maneuver Node - Маневренный узел.
Sol Transition - Начало входа в зону притяжения планеты или спутника.
Time - Время.
Phase Angle - Фазовый угол.
Suicide Burn - Двигатель включается на 100% мощности, удерживая при этом вектор тяги строго против вектора скорости относительно поверхности. При правильном расчёте момента включения скорость гасится ровно в момент касания поверхности.
Atmospheric Entry - Вход в атмосферу.
Warp - Активация ускорения.
Quick Warp - Запустить быстрое ускорение.
Pause MJ Warp - Пауза.
Delta-V Stats - Статистика ΔV
В первую очередь Delta-V Stats пригодится в ангаре, еще на этапе постройки ракеты.
Так, с его помощью вы сможете понять какая тяговооружённость у каждой ступени ракеты, сколько она пролетит, какое время будут работать двигатели на максимальной тяге. Общий вес каждой ступени и всей ракеты в целом. Delta-V Stats помогает рассчитать ΔV в безвоздушном пространстве, а также в атмосфере на выбранной планете и высоте. 📺
 Stage - Номер ступени.
Stage - Номер ступени.
Start Mass - Начальная масса ступени с топливом.
End Mass - Конечная масса ступени без топлива.
Staged Mass - Общий вес ступени.
Burned Mass - Вес топлива в ступени.
TWR - Тяговооруженность.
Max TWR - Максимальное соотношение тяги к весу.
SLT - Соотношение тяги к весу от уровня моря.
Max SLT - Максимальное соотношение тяги к весу от уровня моря.
ISP - Удельный импульс.
Atmo ΔV - ΔV в атмосфере.
Vac ΔV - ΔV в вакууме.
Time - Время работы ступени.
Так, с его помощью вы сможете понять какая тяговооружённость у каждой ступени ракеты, сколько она пролетит, какое время будут работать двигатели на максимальной тяге. Общий вес каждой ступени и всей ракеты в целом. Delta-V Stats помогает рассчитать ΔV в безвоздушном пространстве, а также в атмосфере на выбранной планете и высоте. 📺
Stage - Номер ступени.Start Mass - Начальная масса ступени с топливом.
End Mass - Конечная масса ступени без топлива.
Staged Mass - Общий вес ступени.
Burned Mass - Вес топлива в ступени.
TWR - Тяговооруженность.
Max TWR - Максимальное соотношение тяги к весу.
SLT - Соотношение тяги к весу от уровня моря.
Max SLT - Максимальное соотношение тяги к весу от уровня моря.
ISP - Удельный импульс.
Atmo ΔV - ΔV в атмосфере.
Vac ΔV - ΔV в вакууме.
Time - Время работы ступени.
Orbit Info - Информация об орбите
Общая информация о текущей орбите аппарата.
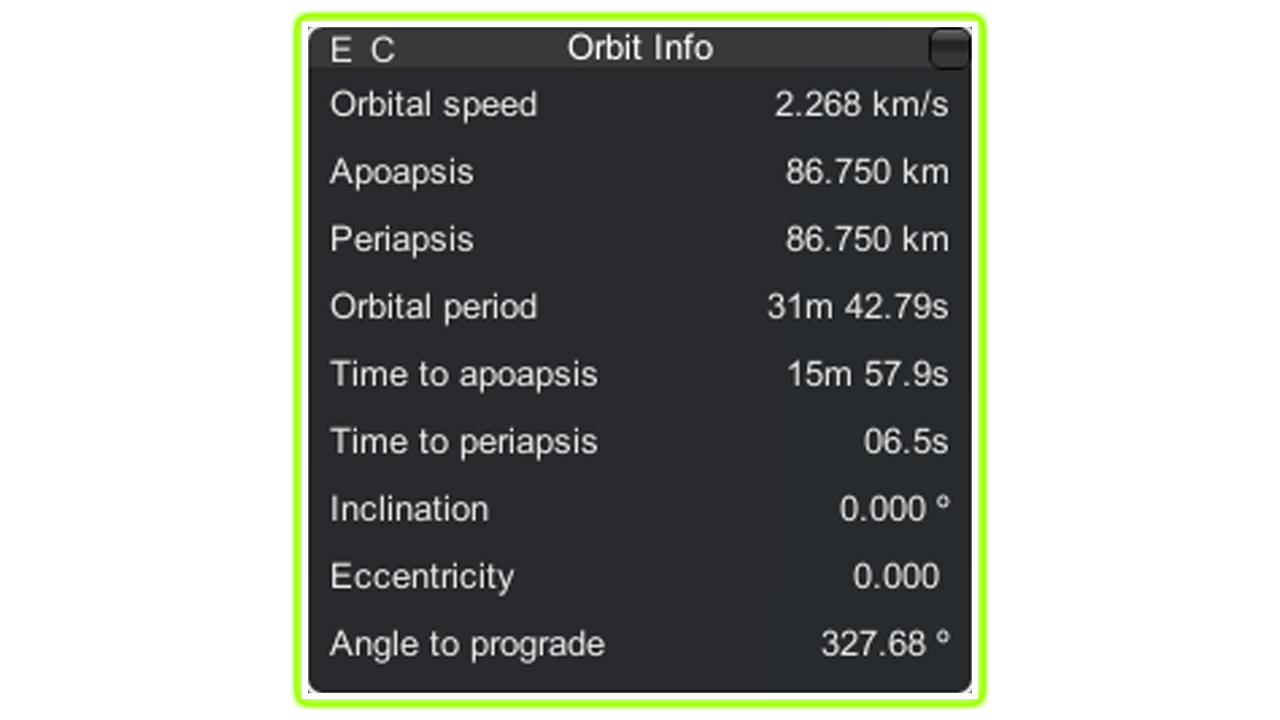
Orbital Speed - Орбитальная скорость.
Apoapsis - Апоцентр.
Periapsis - Перицентр.
Orbital Period - Орбитальный период.
Time To Apoapsis - Время до апоцентра.
Time To Periapsis - Время до перицентра.
Inclination - Наклон.
Eccentricity - Эксцентриситет.
Angle To Prograde - Угол относительно направления движения небесного тела и положением корабля на его орбите.
Orbital Speed - Орбитальная скорость.
Apoapsis - Апоцентр.
Periapsis - Перицентр.
Orbital Period - Орбитальный период.
Time To Apoapsis - Время до апоцентра.
Time To Periapsis - Время до перицентра.
Inclination - Наклон.
Eccentricity - Эксцентриситет.
Angle To Prograde - Угол относительно направления движения небесного тела и положением корабля на его орбите.
Surface Info - Данные о поверхности
Информация о поверхности над аппаратом на текущий момент.
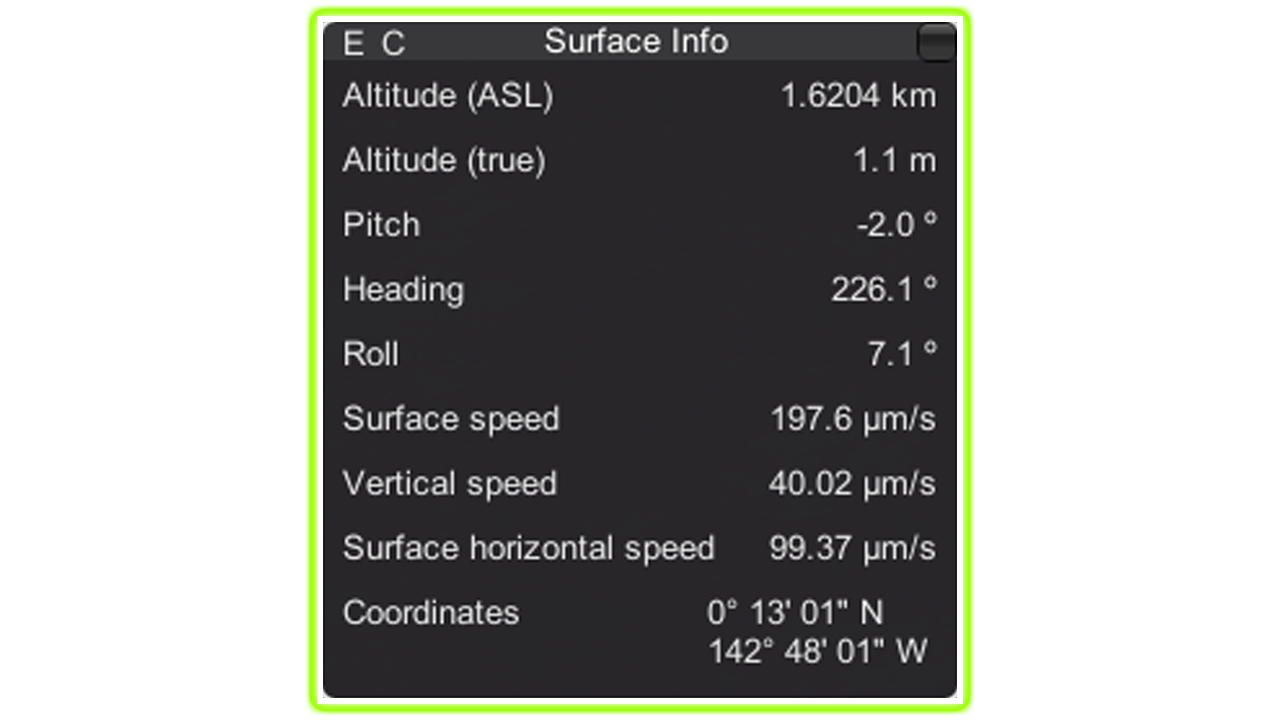 Altitude (ASL) - Высота над уровнем моря.
Altitude (ASL) - Высота над уровнем моря.
Altitude (True) - Высота над поверхностью.
Pitch - Тангаж.
Heading - Направление.
Roll - Крен.
Surface Speed - Скорость относительно поверхности.
Vertical Speed - Вертикальная скорость.
Surface Horizontal Speed - Горизонтальная скорость.
Coordinates - Координаты.
Altitude (ASL) - Высота над уровнем моря.Altitude (True) - Высота над поверхностью.
Pitch - Тангаж.
Heading - Направление.
Roll - Крен.
Surface Speed - Скорость относительно поверхности.
Vertical Speed - Вертикальная скорость.
Surface Horizontal Speed - Горизонтальная скорость.
Coordinates - Координаты.
Vessel Info - Информация о судне
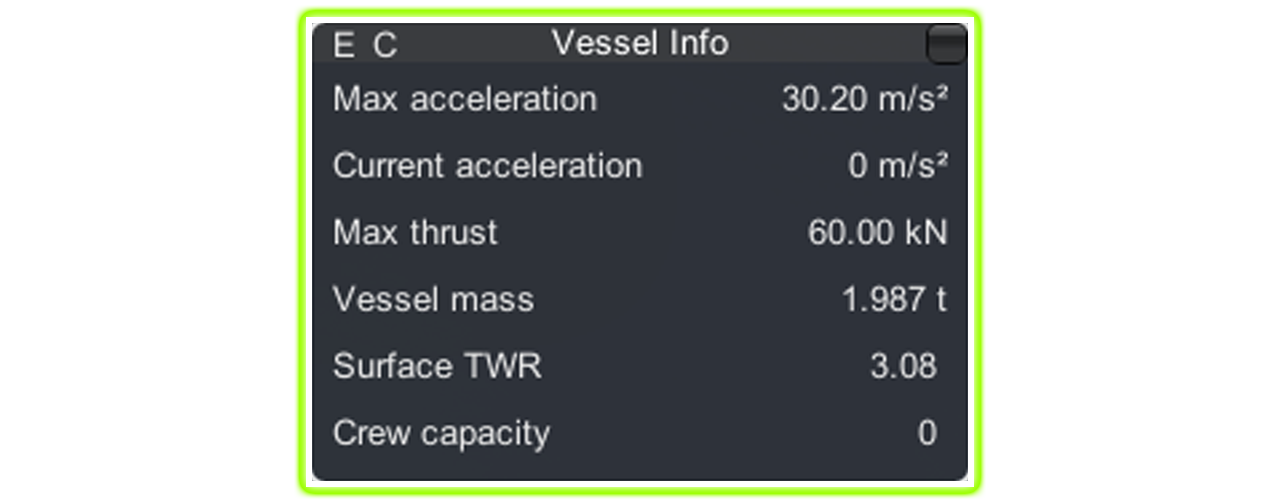
Max Acceleration - Максимальное ускорение.
Значение будет меняться в зависимости от плотности атмосферы и веса ракеты.
Current Acceleration - Текущая выставленная тяга. Значение контролируется вами.
Кнопка Shift, прибавляет мощность двигателя, кнопка Ctrl, убавляет текущее ускорение.
Max Thrust - Максимальная тяга двигателя.
Суммарная тяга двигателей той ступени, которую вы активируете в первую очередь.
Vessel Mass - Общая масса.
Surface TWR - Тяговооружённость.
Crew Capacity - Количество мест для экипажа.
TWR это соотношение тяги к весу. Тяговооружённость ракеты или ее ступени.
Для Кербина это значение не должно опускаться ниже 1.00, иначе ракета не сможет взлететь.
Научно Исследовательский Комплекс
В режиме карьеры у MechJeb есть прошивки, его модули доступны не сразу, а открываются по по мере изучения дерева исследований и улучшения центра слежения. Здесь, написано какой модуль MechJeb станет доступен после их изучения и цена изучения.
![]()
Flight Recorder - Регистратор полетов.
Scripting Module - Скриптовый модуль.
Settings - Общие настройки MechJeb.
Smart RCS - Контроль двигателей РСУ.
Delta-V Stats - Статистика ΔV.
Orbit Info - Информация об орбите.
Surface Info - Данные о поверхности.
Vessel Info - Информация о судне.
![]()
Станет доступно:
Custom Window Editor - Редактор окон.
Smart A.S.S. - Умная стабилизация.
![]()
Станет доступно:
Attitude Adjustment - Регулировка ориентации.
RCS Balancer - Модуль не работает.
Translatron - Контроль тяги двигателя.
Utilities - Вспомогательные параметры.
Warp Helper - Умное ускорение времени.
![]() Для дальнейшего изучения, нужно улучшить Научно Исследовательский Комплекс.
Для дальнейшего изучения, нужно улучшить Научно Исследовательский Комплекс.
Цена улучшения до второго уровня: 451.000 кредитов. 💰
![]()
Станет доступно:
Rover Autopilot - Ровер автопилот.
![]()
Станет доступно:
Aircraft Approach & Autoland - Посадка самолетов.
Ascent Guidance - Руководство по выходу на орбиту.
![]() Для дальнейшего изучения, нужно улучшить Научно Исследовательский Комплекс.
Для дальнейшего изучения, нужно улучшить Научно Исследовательский Комплекс.
Цена улучшения до третьего уровня: 1.690.000 кредитов. 💰
![]()
Станет доступно:
Docking Autopilot - Стыковка.
![]()
Стоимость улучшения 150.000 кредитов. 💰
Станет доступно:
Landing Guidance - Руководство по посадке.
Maneuver Node Editor - Редактор маневренных узлов.
Maneuver Planner - Планировщик маневров.
Rendezvous Autopilot - Простое свидание.
Rendezvous Planner - Свидание с целью.
![]()
Модули доступные с самого начала
Aircraft Autopilot - Автопилот.Flight Recorder - Регистратор полетов.
Scripting Module - Скриптовый модуль.
Settings - Общие настройки MechJeb.
Smart RCS - Контроль двигателей РСУ.
Delta-V Stats - Статистика ΔV.
Orbit Info - Информация об орбите.
Surface Info - Данные о поверхности.
Vessel Info - Информация о судне.
Управление полетом
Стоимость изучения - 45 науки. 🎓Станет доступно:
Custom Window Editor - Редактор окон.
Smart A.S.S. - Умная стабилизация.
Улучшенное управление
Стоимость изучения - 90 науки. 🎓Станет доступно:
Attitude Adjustment - Регулировка ориентации.
RCS Balancer - Модуль не работает.
Translatron - Контроль тяги двигателя.
Utilities - Вспомогательные параметры.
Warp Helper - Умное ускорение времени.
Цена улучшения до второго уровня: 451.000 кредитов. 💰
Полевые исследования
Стоимость изучения - 300 науки. 🎓Станет доступно:
Rover Autopilot - Ровер автопилот.
Беспилотные технологии
Стоимость изучения - 300 науки. 🎓Станет доступно:
Aircraft Approach & Autoland - Посадка самолетов.
Ascent Guidance - Руководство по выходу на орбиту.
Цена улучшения до третьего уровня: 1.690.000 кредитов. 💰
Улучшенные беспилотники
Стоимость изучения - 550 науки. 🎓Станет доступно:
Docking Autopilot - Стыковка.
Улучшенный центр слежения
Для открытия этих модулей, нужно улучшить центр слежения до второго уровня.Стоимость улучшения 150.000 кредитов. 💰
Станет доступно:
Landing Guidance - Руководство по посадке.
Maneuver Node Editor - Редактор маневренных узлов.
Maneuver Planner - Планировщик маневров.
Rendezvous Autopilot - Простое свидание.
Rendezvous Planner - Свидание с целью.
🏆
Beat Kerbal Space Program's 100% run?
Flex it — let your friends know you pulled it off.
More Kerbal Space Program guides
- DeltaV map★ 5 (1.2k)46k views2.5k ♥1 minUpdated Feb 11, 2021
- The Complete Idiot's Illustrated Guide to Space Travel (Not Being Updated)★ 5 (875)43k views1.6k ♥30 minUpdated Feb 9, 2018
- Kerbal Physics: An Illustrated Guide To the Stars★ 5 (1.6k)43k views2.6k ♥21 minUpdated Mar 21, 2021
- MOD Essentials [ENG]★ 5 (587)38k views1.6k ♥12 minUpdated Mar 6, 2023
- Geostationary Orbits★ 5 (455)26k views899 ♥3 minUpdated Jun 28, 2020
- (Updated) Delta V Map and Transfers for Newbs★ 5 (495)23k views927 ♥6 minUpdated Feb 28




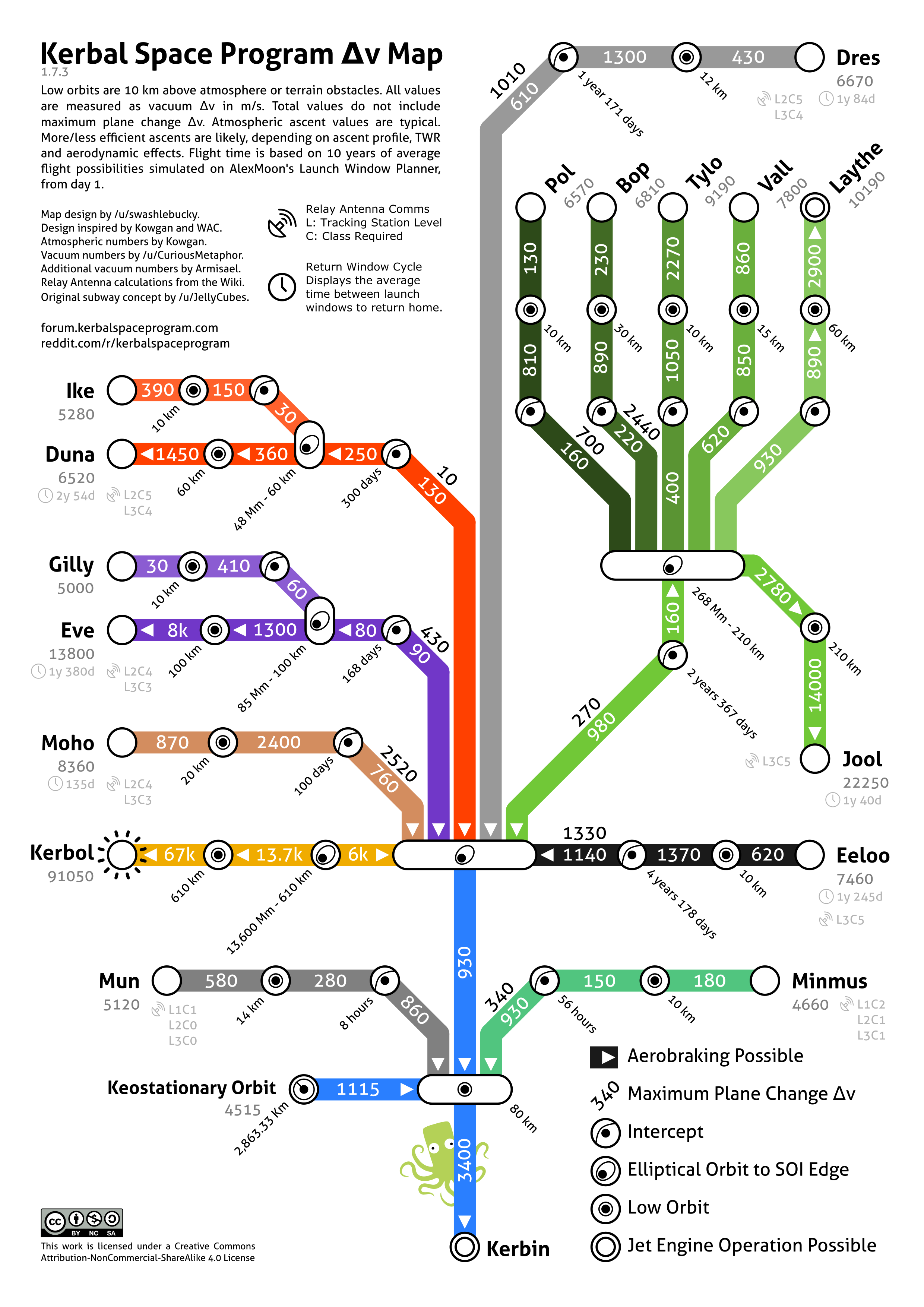
This guide was created by its original author on the Steam Community. Are you the author and want it removed? Request removal.